Informatii generale
- Categorie: Roboti
- Judetul: Iași
- Surse: GitHub - CodrinCrismariu/B.A.R.K: Java Code + CAD for Big Automated Robot Kanine
Descriere
Proiectul nostru este Big Automated Robot “Kanine” sau B.A.R.K pe scurt reprezinta solutia noastra pentru ajutarea omului. Acesta poate fi folosit atat pentru automarea și repetarea unor procese sau pentru pătrunderea în zone inaccesibile omului sau cu risc ridicat.(De exemplu acesta poate parcurge un camp și cu ajutorul unui model de Tensorflow lite poate analiza și colecta informații asupra plantelor sau sa mearga prin medii radioactive sau toxice colectand informații cu ajutorul camerei)
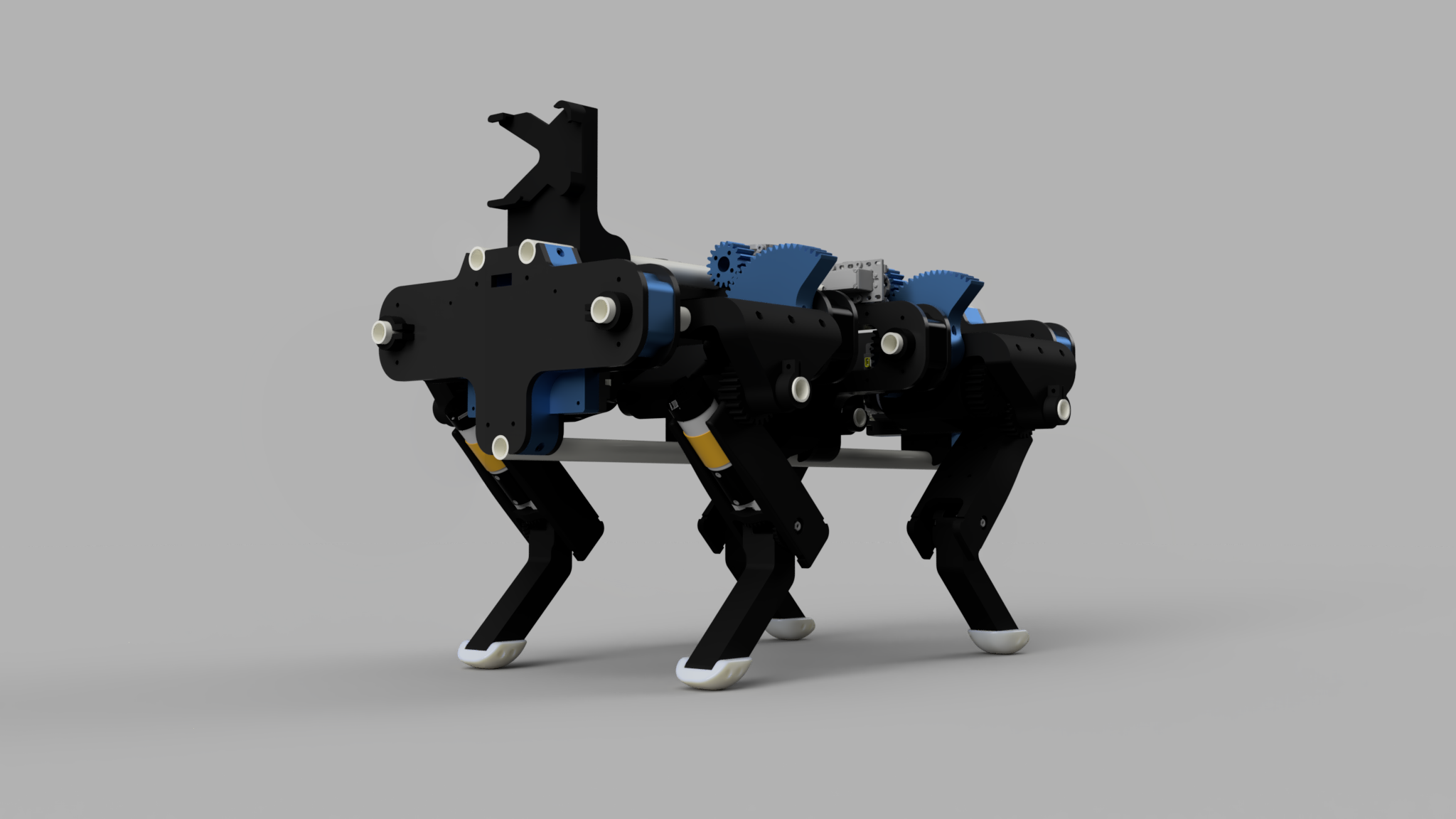
Datorită picioarelor independente acesta poate traversa atat în zone drepte cat si în denivelate datorită independenței membrelor acestuia fiecare putand naviga în toate cele 3 axe. Astfel lipsindu-l de nevoia și dependența față de spațiile închise și plate.
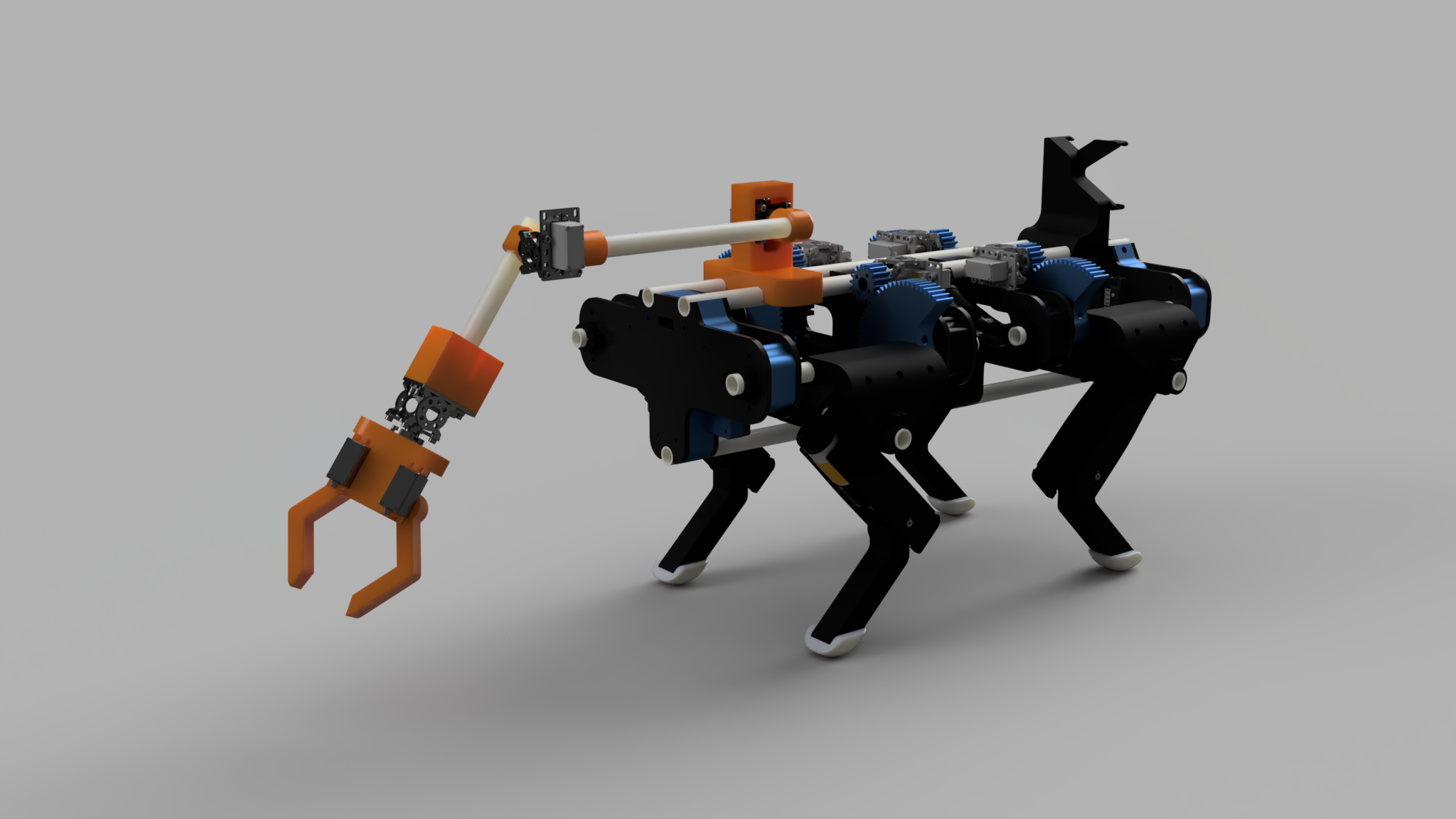
De asemenea acesta poate fi customizat în funcție de nevoi. Mărind astfel modularitatea aceasta fiind limitata fiind doar de imaginatia userului.(Ca exemplu avem doua modele de braturi robotice ce pot pot ajuta în aplicarea diferitelor taskuri ce necesita un nivel mai ridicat de dexteritate. De asemenea pana și capetelor acestora pot fi modificate cu diferite module precum o camera sau senzori)
Tehnologii
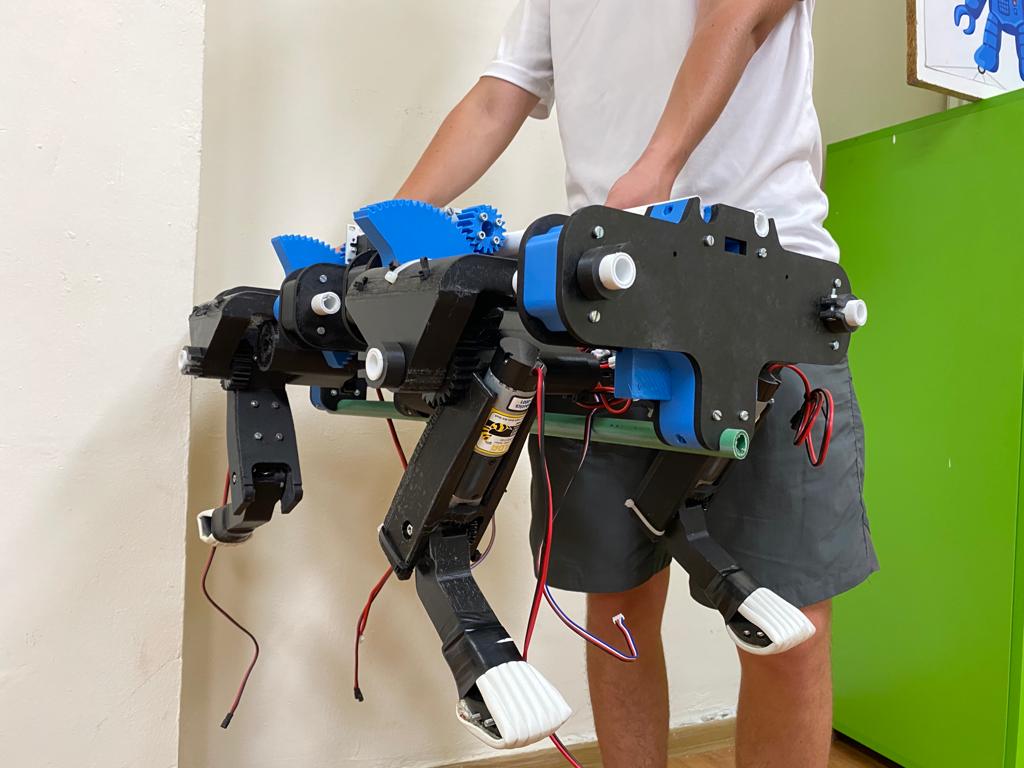
După o luna de proiectare in Autodesk Fusion 360 am ajuns la un design final al robotului. După câteva prototipuri de picior am perfecționat programul de inverse kinematics și metodele de printing pentru a avea cele mai bune rezultate.
Timpul total de printare pentru prototipuri a fost în jur de 30 de ore iar timpul aproximativ de printare al robotului final este de 150 de ore, materialul folosit fiind PLA. B.A.R.K are 4 picioare fiecare avand 2 motoare și 1 servo astfel fiecare modul are 3 axe de libertate. Fiecare modul este controlat independent de un algoritm de inverse kinematics astfel eliberand coderul de mișcările low-level are motorului. Algoritmul de inverse kinematics este ajustat în timp real de un controler PID pentru a muta unghiul la care se afla picioarele pentru a ajuta cainele să-și pastreze echilibrul în cazul în care pășește pe obstacole sau pe un teren înclinat.
La robot este atasat si un telefon Moto G5 redand în timp real feedul camerei către un laptop din aceeași rețea și de pe care se poate rula și un model de TFLite pentru object detection. În același timp folosim mai multe threaduri ale telefonului pentru a misca toate picioarele în paralel și pentru a transmite feedul camerei telefonului și în final tot robotul este alimentat de 2 baterii Matrix 12V 3000mAh si comandat de 2 REV Expansion Huburi.
Cerinte sistem
Laptop/PC cu Android Studio v2021.2.1
Telefon cu Android ruland FTC Robot Controller
Realizatori
Codrin Crismariu
- Scoala: Liceul Teoretic de Informatica “Grigore Moisil” Iasi
- Clasa: 10
- Judet: Iași
- Oras: Iasi
Denis Crismariu
- Scoala: Liceul Teoretic de Informatica Grigore Moisil Iasi
- Clasa: 11
- Judet: Iași
- Oras: Iași
Screenshots