Informatii generale
- Categorie: Roboti
- Judetul: București
- Surse: GitHub - AlexiaNi/Cheby
Descriere
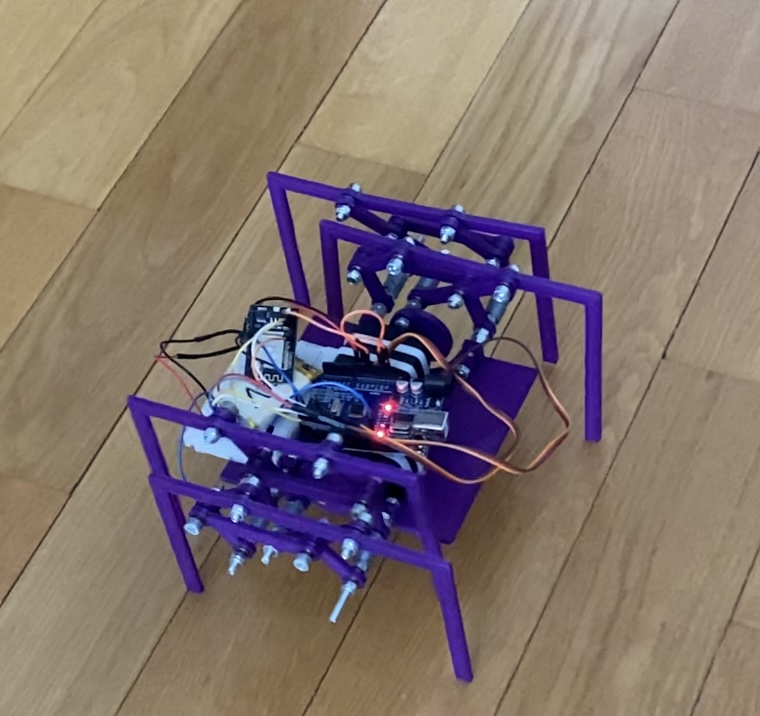
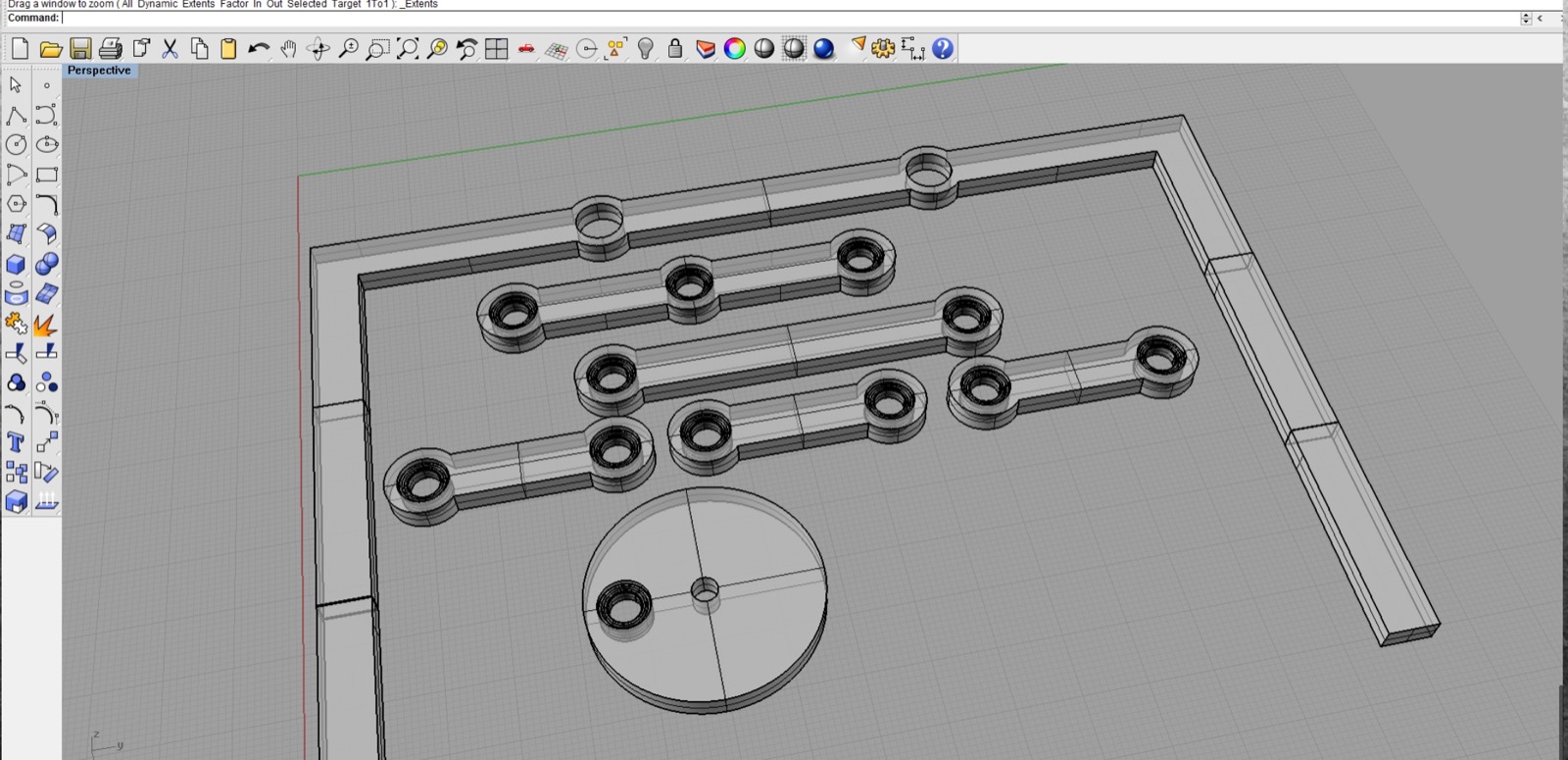
Cheby este un robot care își propune explorarea Legăturii Chebyshev ca mijloc de deplasare pentru mecanisme. Ansamblul a fost printat 3D din PLA, fiind introduși rulmenți în punctele de rotație. Acesta este controlat wireless prin modulul ESP32 (cu ajutorul unui Arduino UNO). În cinematică, Legătura Chebyshev (asemenea altor legături precum Klann și Jansen), își propune să transforme mișcarea de rotație în mișcare liniară, cu viteză aproximativ constantă.
Tehnologii
Robotul se controleaza wireless cu ajutorul modulului ESP32 alimentat prin intermediul unui Arduino UNO si a doua baterii cu litiu de 3.7V (puse in serie). Conectate la pivotii de rotatie sunt doua motoare MG995 cu rotatie de 360 de grade alimentate de la o baterie cu litiu 3.7V, 1800mAh. Introdusi in punctele de rotatie ale picioarelor se afla rulmenti pentru a nu genera rezistenta in cadrul motoarelor.
Cerinte sistem
Arduino UNO
Modul ESP32
Baterii Litiu 3.7V x3
Conexiune Wi-Fi
Accesorii
Realizatori
Alexia Niculae
- Scoala: Colegiul Nationala de Informatica “Tudor Vianu”
- Clasa: 10
- Judet: București
- Oras: Bucuresti
Screenshots