Informatii generale
- Categorie: Roboti
- Judetul: Iași
- Surse: GitHub - BigPingLowIQ/Diffy
Descriere
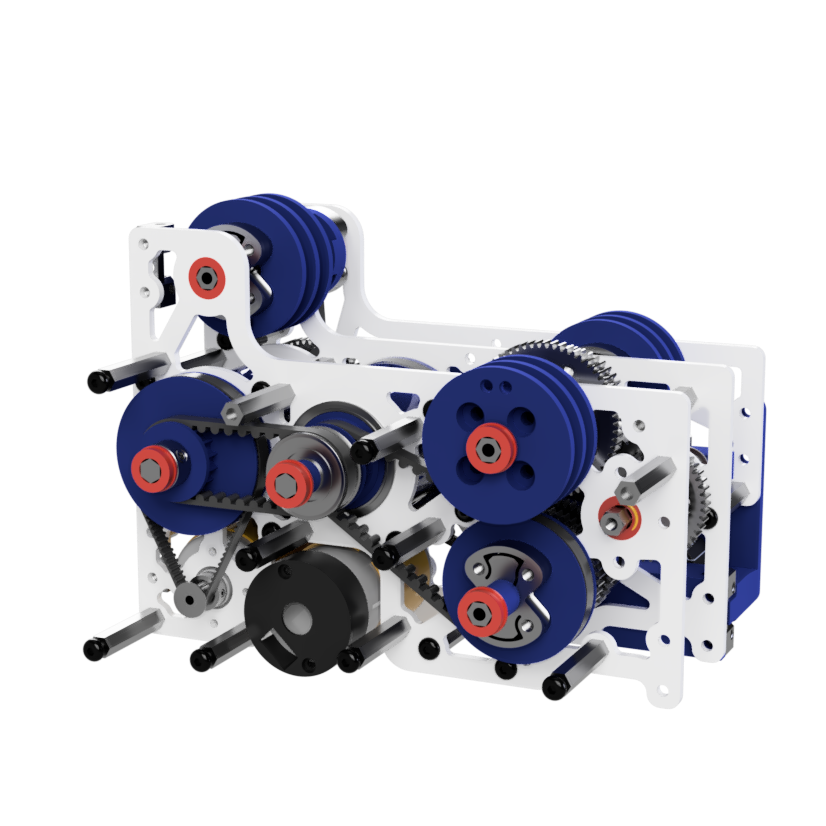
Proiectul DIFFY propune un mecanism diferențial capabil să distribuie dinamic puterea a două motoare către două grade de libertate. Sistemul permite fie concentrarea puterii ambelor motoare pe o singură axă pentru a obține forță sau viteză ridicată, fie o alocare echilibrată între cele două axe. Această abordare optimizează eficiența energetică și performanța, fiind utilă în aplicații unde spațiul și resursele sunt limitate, cum ar fi roboții de explorare spațială.
Mecanismul a demonstrat atât flexibilitate funcțională, cât și durabilitate în condiții de stres. Am folosit transmisii prin curele cu pas mic pentru un randament cât mai mare. Modificările aduse pe parcurs, precum înlocuirea materialelor și optimizarea programării, au dus la o versiune finală performantă și compactă. Proiectul demonstrează aplicarea eficientă a principiilor de proiectare mecanică și control al puterii într-un sistem inovator, modular și adaptabil.
Tehnologii
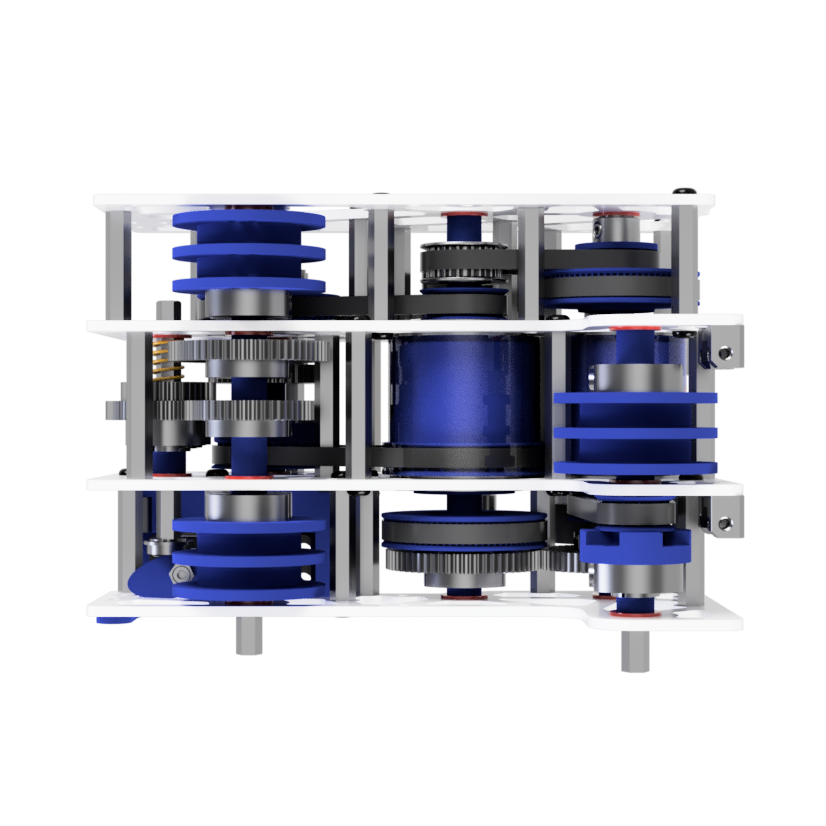
Ținta principală a fost un design cât mai compact și rigid, pentru a putea fi integrat pe diverse mecanisme. Sistemul dispune de două grade de libertate: unul cu o viteză maximă de 1200 RPM (rotații pe minut), iar celălalt cu posibilitatea de a trece de la 1200 RPM la 300 RPM — viteză care îi permite să tragă o greutate de aproximativ 37,5 kg. Specificațiile le-am stabilit în acord cu cerințele competiției internaționale de robotică First Tech Challenge pentru că ne-am propus să testăm funcționalitatea, eficiența și fiabilitatea sistemului pe un robot competitiv.
Diferențialul utilizează curele cu profil HTD5 pentru transferul de putere între modulele diferențiale și axuri, iar curele cu profil GT2 pentru transmiterea puterii de la motor. Am ales profilul HTD5 datorită dinților de dimensiuni mari, care oferă o aderență excelentă și reduc riscul de patinare — un aspect esențial mai ales atunci când direcția de rotație a ieșirilor se schimbă brusc. În aceste condiții, tensionarea corectă a curelelor este esențială: dacă sunt prea slăbite, apare patinarea, iar dacă sunt prea tensionate, crește frecarea și, implicit, uzura sistemului.
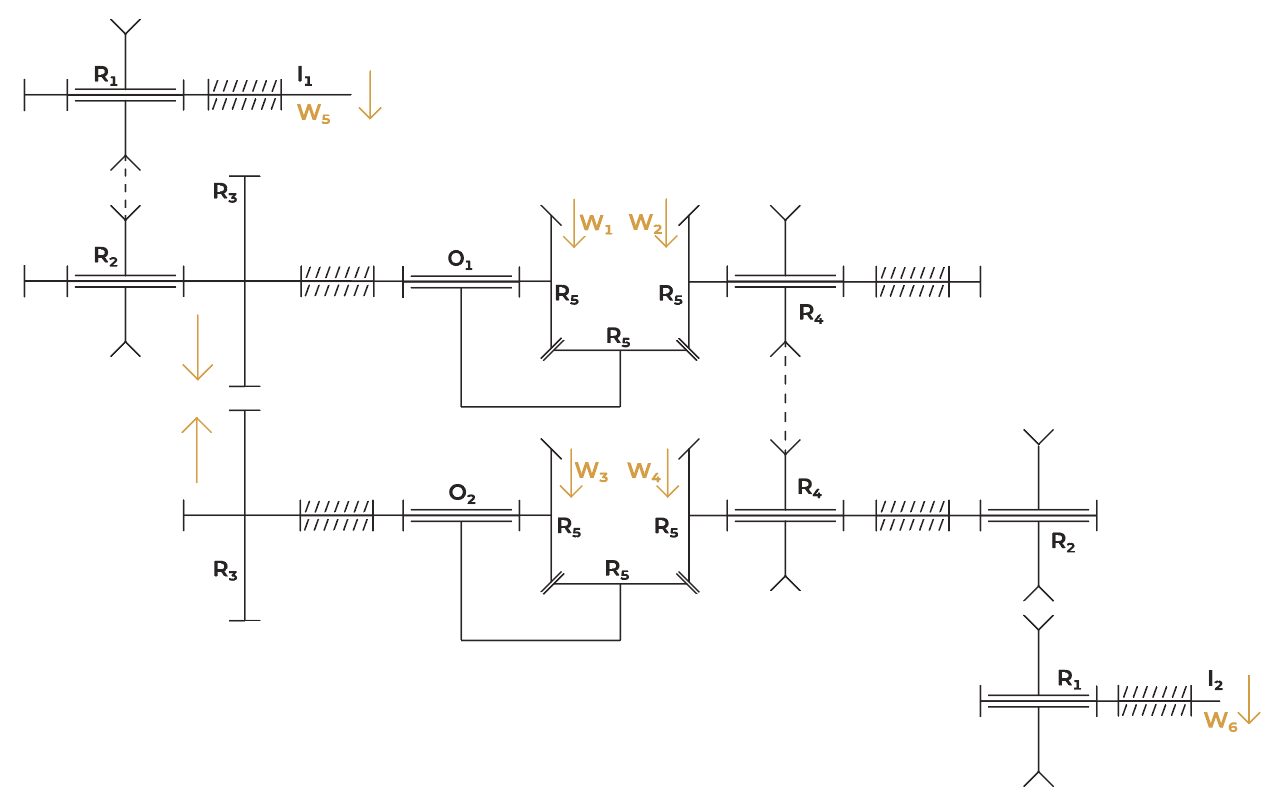
Schema tehnică
Diferențialul reprezintă o combinație de transmisii care ajung să aibă comportamentul căutat de noi. Folosind modulele diferențiale într-un mod inteligent, am reușit să atingem acest lucru.
Împreună cu formulele aferente fiecărei transmisii, am calculat cinematica mecanismului și am ajuns la formulele finale care stabilesc relația dintre INPUT-uri și OUTPUT-uri, fără a ține cont de forțe sau mase.
Schimbător
Diferențialul proiectat dispune de două ieșiri, permițând acționarea simultană a două grade de libertate. Una dintre ieșiri este setată pentru a funcționa constant la o viteză maximă de 1200 rpm, în timp ce cealaltă este conectată la un sistem de transmisie cu schimbător de viteze, care permite comutarea instantanee între 1200 RPM și 300 RPM. Această trecere la o viteză mai mică are ca rezultat o creștere semnificativă a cuplului, ceea ce extinde aplicabilitatea diferențialului în mecanisme care necesită forță crescută.
Testare software
Folosind formulele de cinematică, am calculat ce putere trebuie să primească motoarele în funcție de puterea pe care vrem să o primească output-urile. Motoarele primesc un număr între (-1, 1) care reprezintă direcția și puterea pe care o primesc. {-1, 1} fiind maximul pentru ambele sensuri, iar 0 fiind oprit.
Cerinte sistem
Pentru implementarea și testarea sistemului, este necesar un laptop echipat cu Android Studio, utilizat pentru programarea și punerea în funcțiune a mecanismului. De asemenea, este necesar un controller dedicat, care să permită controlul precis al funcțiilor sistemului în timpul testelor și operării.
Realizatori
Dragos Babusanu
- Scoala: Liceul Teoretic de Informatică “Grigore Moisil” Iaşi
- Clasa: 11
- Judet: Iași
- Oras: Iași
Sebastian-Florin Tanase
- Scoala: Liceul Teoretic de Informatică “Grigore Moisil” Iaşi
- Clasa: 12
- Judet: Iași
- Oras: Iasi
Screenshots