Informatii generale
- Categorie: Roboti
- Judetul: Argeș
- Surse: GitHub - taohio/MedBot
Descriere
MedBOT, derivat de la Medical Bot, este un proiect care reprezintă un braț bionic utilizat de oamenii care suferă amputări atât în ceea ce privește degetele, cât și întregul braț. Acest braț este capabil să simuleze mișcările degetelor sau ale încheieturii, acționându-le cu ajutorul unor servomotoare în funcție de detecțiile unui senzor muscular amplasat pe braț. MedBOT are ca scop înlocuirea unui braț, folosind tehnologii și componente atât accesibile la preț, cât și eficiente.
Tehnologii
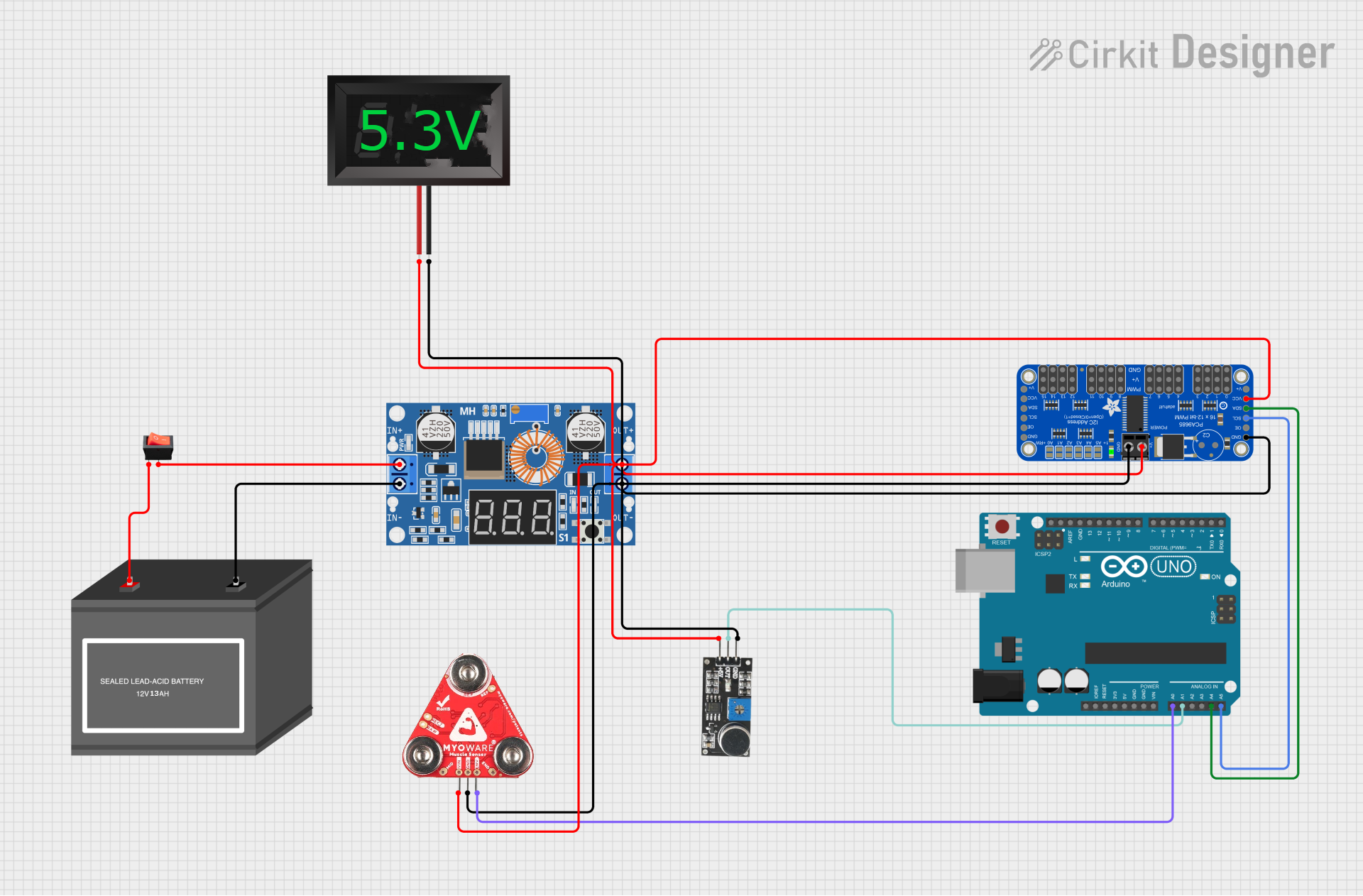
Design-ul brațului, cât și al carcasei în care sunt poziționate componentele, este realizat în Autodesk Fusion 360. Acesta este gândit în așa fel încât toate componentele încap în interiorul pieselor printate cu ajutorul unui Ender-3 V3 SE. Degetele sunt acționate cu ajutorul unui sistem de ață, utilizând scripeți atașați la 5 Servo MG996R. Servomotoarele sunt controlate de un microcontroller PCA9865, coordonat de un microprocesor Arduino UNO R3. Încheietura este acționată prin intermediul unui angrenaj de roți dințate, oferind un arc de rotație de 180 grade. MedBOT se folosește de MyoWare, o tehnologie avansată care, prin intermediul senzorului EMG 2.0, amplasat pe braț, oferă valori către Arduino și astfel, în funcție de valorile citite, întreg ansamblul este acționat. Senzorul EMG are conectat un Shield, oferind alimentare printr-o baterie Li-Po de 3.7V, care are un buton on/off și, de asemenea, care ajută la detecția impulsurilor musculare. O componentă adăugată ulterior o reprezintă senzorul de detecție a sunetului KY-037, care detectează sunete precum ,Au, , în cazul unei strângeri prea puternice a mâinii, deschizând-o imediat. Pe partea de alimentare este folosită o baterie regenerabilă de 6V, la care este conectat un switch (on/off), curentul fiind distribuit către un reductor. Acesta reduce curentul la 5V și este distribuit în mai multe direcții:
-5V către Arduino Uno R3
-5V către senzorul KY-037
-5V către senzorul EMG (alimentare separată față de bateria Li-Po)
-5V către fiecare servomotor
-5V către PCA9865.
Programarea este făcută prin intermediul aplicației Arduino IDE.
Cerinte sistem
Nu există cerințe de sistem, MedBOT funcționând independent.
Realizatori
Teodora Matei
- Scoala: Colegiul Național Zinca Golescu
- Clasa: 10
- Judet: Argeș
- Oras: Pitești
Rares Coltan
- Scoala: Colegiul National ,Zinca Golescu"
- Clasa: 9
- Judet: Argeș
- Oras: Pitesti
Screenshots