Informatii generale
- Categorie: Roboti
- Judetul: Iași
- Surse: GitHub - Bionix123/CompRobots_V1_IE2016: CompetitionRobots_V1_IE2016
Descriere
In proiectul meu am inclus 3 tipuri de roboti conceputi pentru a participa la diferite competiti: Line Follower, Mini Sumo, Maze(labirint). Acesti roboti respecta dimensiunile specifice in functie de categorie.
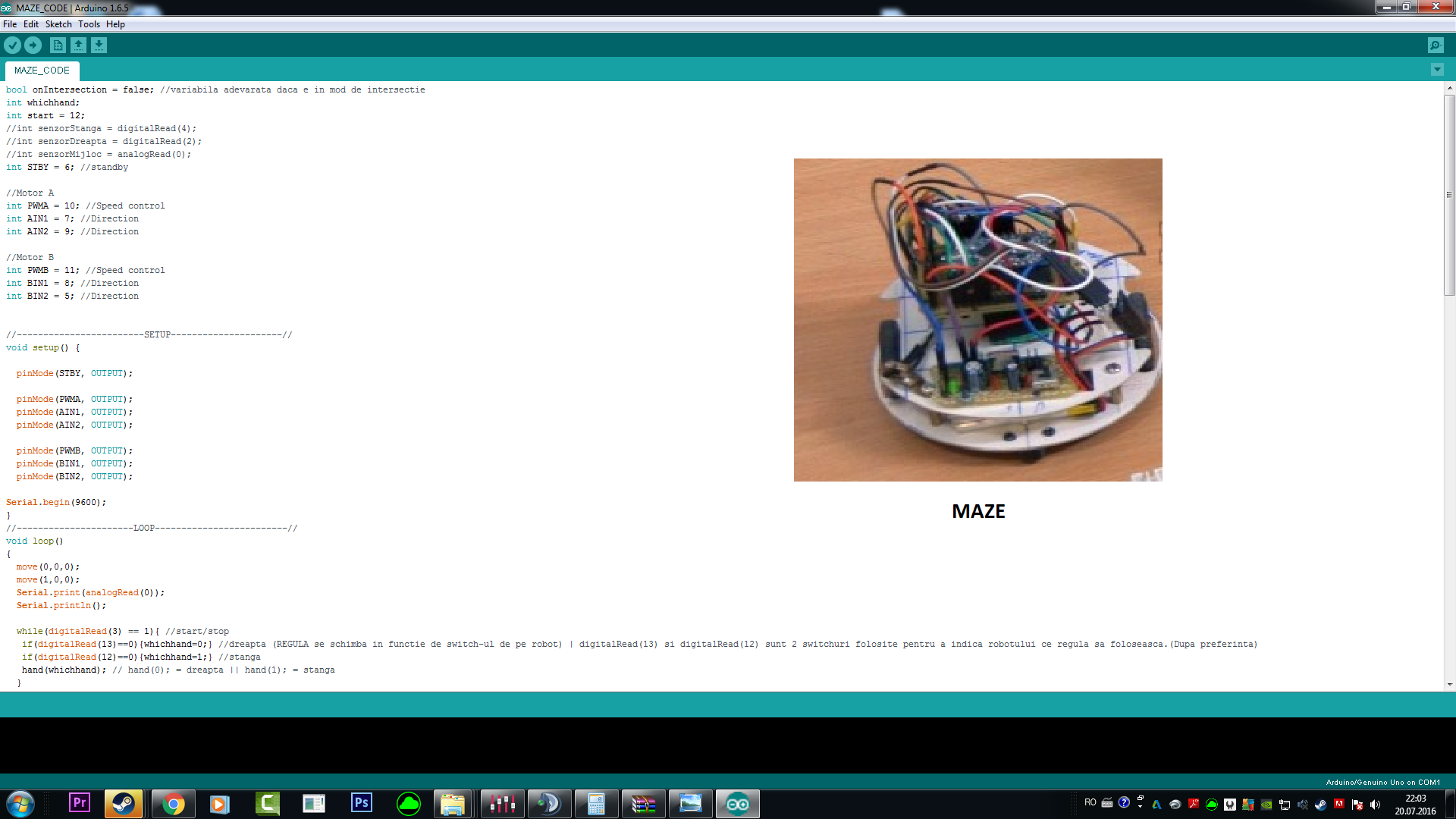
1.Maze (Labirintul cu pereti)
-Dimensiunile robotului sunt 10x10cm.(Unele competitii accepta si 12x12cm)
-Robotul este autonom.
-Robotul se bazeaza pe doua reguli: Regula mainii drepte sau regula mainii stangi. Pe langa aceste doua reguli, acesta “urmarese” peretele printr-o simpla functie de wall following. (Maze-solving algorithm - Wikipedia)
-Un switch pozitionat in partea din spate a robotului este folosit pentru a schimba regula in functie de preferinte.
-Componente utilizate: Arduino Pro Mini @16mhz, Driver motoare TB6612FNG, Motoare Pololu HP 50:1 600RPM, 3 senzori sharp de distanta.(2digitali si unul analog)
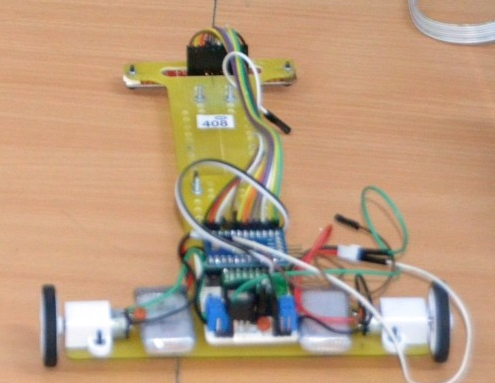
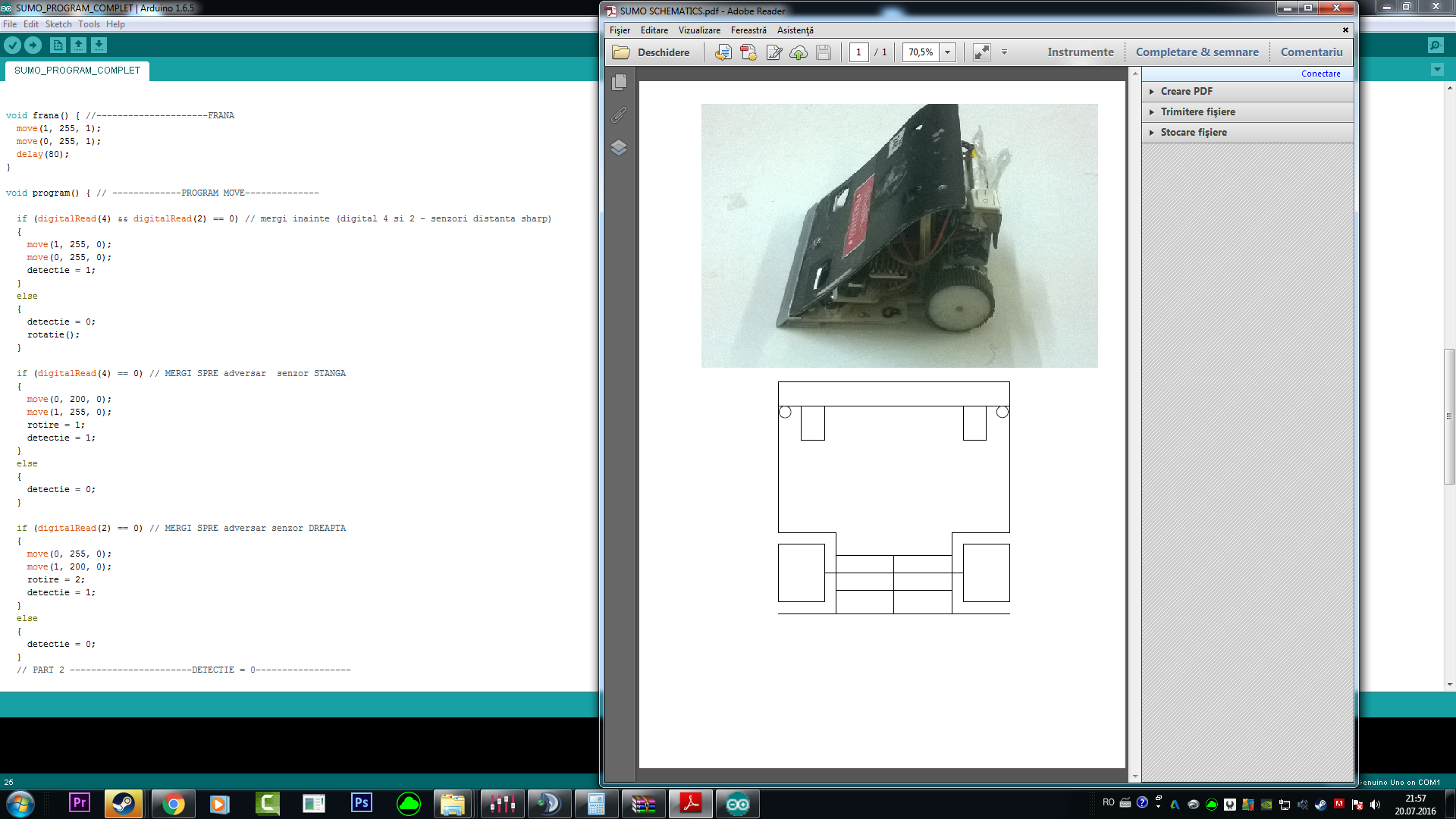
2.Mini Sumo
-Dimensiunile robotului sunt 10x10cm.(Dimensiunile specifice acestei categorii)
-Robotul este autonom.
-Ca si tactica de lupta, robotul isi cauta oponentul mergand inainte pana la dunga alba unde se intoarce, sau rotiundu-se pana cand senzorii auto-detecteaza oponentul.
-Robotul cantareste 499grame(Limita fiind de 500grame).
-Componente utilizate: Arduino Pro Mini @16mhz, Driver motoare TB6612FNG, Motoare Pololu HP 3:1 1000RPM, 2senzori sharp digitali (40cm), 2senzori de reflexie a luminii QTR1-A
-Motoarele utilizate sunt perfecte deoarece ofera in acelasi timp si viteza si putere, astfel incat combinate cu masa robotului(499g), ofera forta necesara pentru un atac puternic ce duce deobicei la eliminarea adversarului.
-In cazul in care robotul rateaza tinta(oponentul) si ajunge la dunga alba(care se afla la marginea ringului circular), acesta utilizeaza senzorii de reflexie a luminii ce se afla in partea de jos pentru a detecta culoarea alb si a evita “auto-descalificarea” prin intermediul unei rotatii la 180 de grade.
3.Line Follower
-Dimensiunile robotului nu trebuie sa depaseasca in lungime si latime dimensiunile unei foi A4. In cazul robotului Line Follower, acesta nu depaseste dimensiunile impuse.
-Robotul este autonom.
-Robotul se bazeaza pe un algoritm PID din care foloseste doar valorile P si D (proportionala si derivata).Pe langa PD, pentru a nu pierde linia robotul utilizeaza o functie de auto-corectie, in momentul in care robotul a pierdut linia, acesta reduce brusc din viteza si incearca sa vireze in directia in care a “vazut” linia ultima data.
-Robotul poate ocoli obstacole daca este nevoie. Necesita atasarea unui senzor de distanta.
-Componente utilizate: Arduino Pro Mini @16mhz, Driver motoare TB6612FNG, Motoare Pololu HP 10:1 3000RPM, Bareta senzori de reflexie a luminii (“Senzor de linie”) QTR8-A.
In arhiva de pe github (linkul atasat), se afla referatele celor 3 roboti + codurile sursa / metoda de functionare.
Tehnologii
1.-Componente utilizate: Arduino Pro Mini @16mhz, Driver motoare TB6612FNG, Motoare Pololu HP 50:1 600RPM, 3 senzori sharp de distanta.
-Cadrul robotului este circular deoarece ajuta la mobilitatea robotului pe traseu.
-Cei 2 senzori de distanta laterali indeplinesc task-ul de “wall following” in timp ce senzorul frontal are rolul de a detecta peretii frontali, iar in cele din urma robotul se roteste la 90 de grade pentru a iesi din “fundatura”.
2.Mini Sumo:
-Componente utilizate: Arduino Pro Mini @16mhz, Driver motoare TB6612FNG, Motoare Pololu HP 3:1 1000RPM, 2senzori sharp digitali (40cm), 2senzori de reflexie a luminii QTR1-A
-Schita initiala de la care am plecat: Imgur: The magic of the Internet (realizata de mine in sktech-up)
-2 senzori de distanta sunt pozitionati frontal si ajuta la detectia oponentului; 2 senzori de reflexie QTR1-A sunt pozitionati “sub” robot pentru a detecta marginea alba a ringului.
-Robotul respecta dimensiunile impuse: 10x10cm, 500g
3.Line Follower:
-Dimensiunile robotului nu depasesc in lungime si latime dimensiunile unei foi A4.
-Robotul este foarte usor pentru a reduce din inertie, dar are masa ideala pentru a pastra aderenta la sol a rotilor.
-Componente folosite: Arduino Pro Mini @16mhz, Driver motoare TB6612FNG, Motoare Pololu HP 10:1 3000RPM, Bareta senzori de reflexie a luminii QTR8-A.
-Cadrul este unul aerodinamic ce foloseste un design specific pentru a oferi destul spatiu componentelor amplasate pe el.
Detalii mai amanuntite se pot gasi in documentatia atasata pe github!
Cerinte sistem
Arduino (last version)
Arduino drivers
Realizatori
Josanu Rares-Ionut
- Scoala: Liceul de informatica “Grigore Moisil” Iasi
- Clasa: 9
- Judet: Iași
- Oras: Iasi
Screenshots