Informatii generale
- Categorie: Roboti
- Judetul: Hunedoara
- Surse: GitHub - doctodexter/Security-Video-Car
Descriere
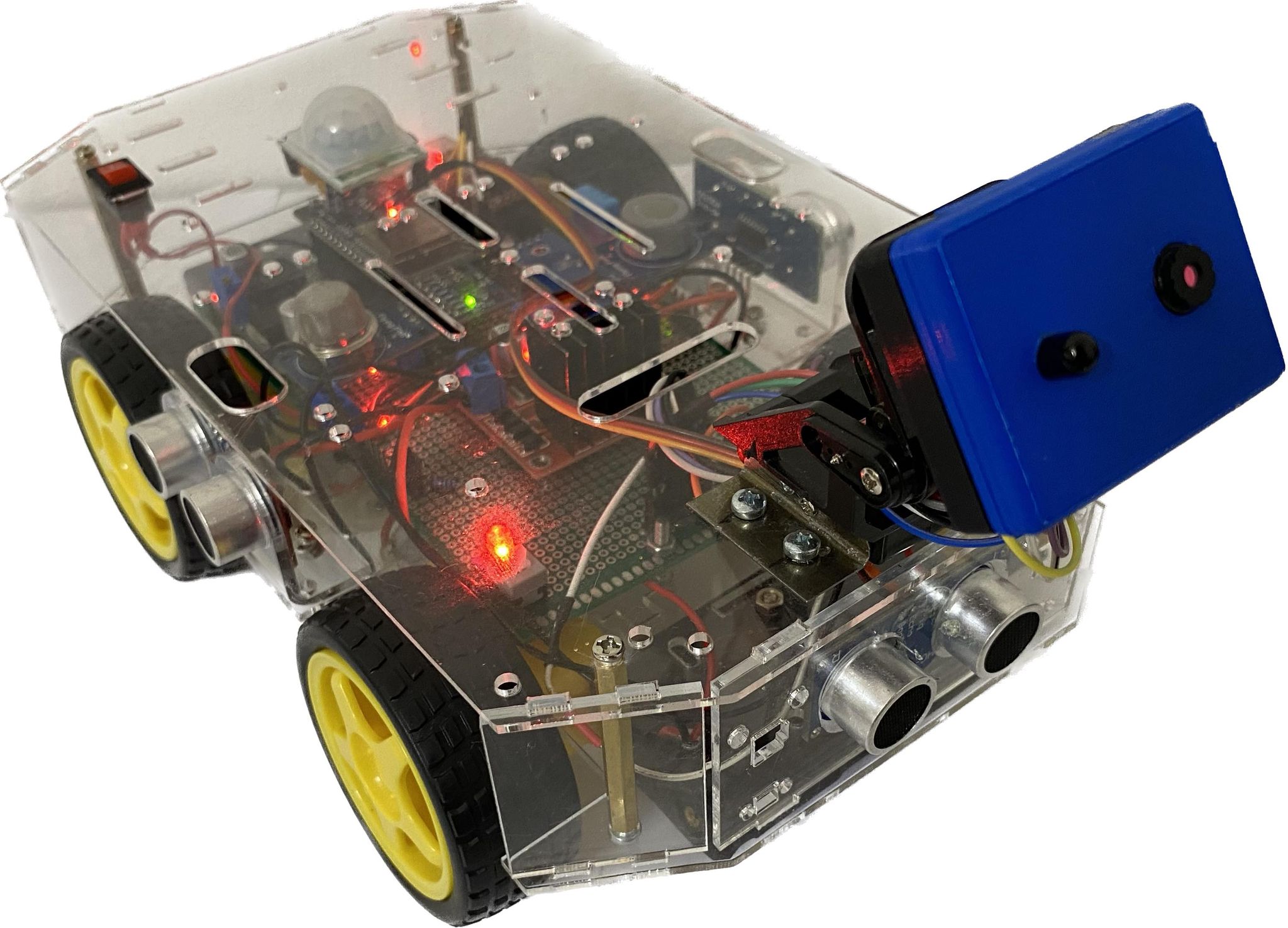
Prototipul de robot “Security Video Car” a fost realizat cu scopul de a supraveghea o locuința și de a identifica anumite probleme ce pot apărea în acel timp. Așadar, robotul este dotat cu senzori ce identifică posibilele probleme dintr-o locuință, trimițănd notificări în interfața grafică, iar dacă este vorba de o problemă gravă, trimițănd notificări într-un mesaj pe WhatsApp în care descrie problema identificată. Robotul poate fi controlat de la orice distanță, prin taste, iar daca este nevoie, poate fi trecut pe modul autonom roaming. Robotul transmite date reale în timp real. Poziția camerei poate fi, de asemenea, controlată prin taste. Totodată, designul robotului este simplu, funcțional, care permite automatizarea procesului de producție. Astfel, se poate adăuga o carcasă pentru acoperirea componentelor și a firelor.
Tehnologii
• MECANICA
Pentru șasiul mașinii robotizate am utilizat roți din plastic cu înveliș cauciucat, fixate pe o structură de plastic, toate componentele provenind de pe site-ul „https://cleste.ro/” .
Am utilizat 4 motoare DC cu reductor 3 – 6 V.
Gradele de libertate a robotului sunt:
- Mișcarea în față și în spate (pe axa longitudinală)
- Mișcarea laterală (pe axa laterală)
- Mișcarea de rotație (pe axa verticală)
Pe lângă cele 4 motoare DC cu reductor, am utilizat și un motor servo MG90S pentru controlul poziției camerei.
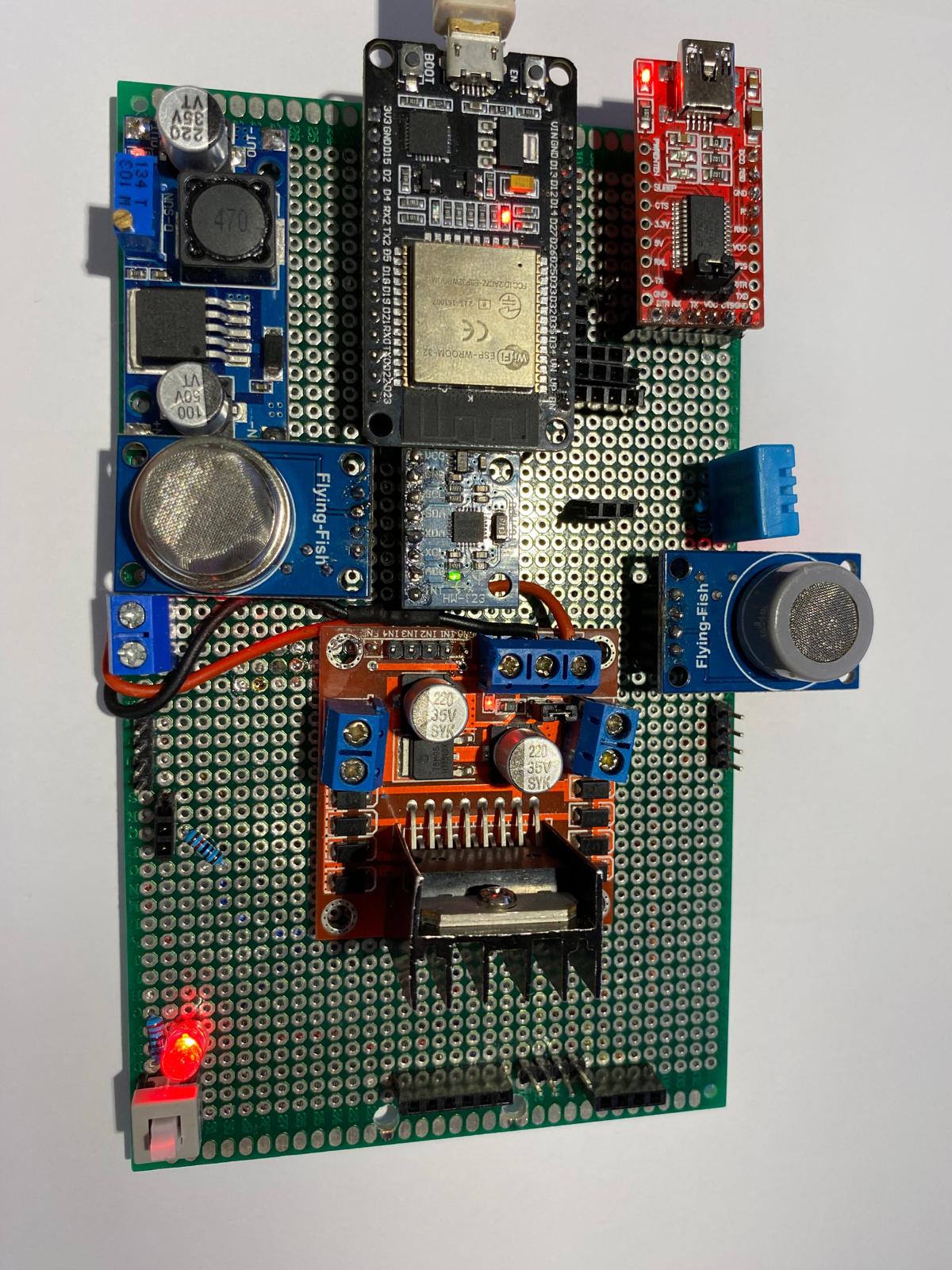
• ELECTRONICA
I. PLĂCILE DE DEZVOLTARE
Am utilizat placa de dezvoltare ESP32, ESP-WROOM-32, WiFi și Bluetooth BLE, Dual Core pentru controlul motoarelor și pentru afișarea valorilor date de senzori pe interfața grafică. Placa este conectată la WiFi.
II. SENZORII - Senzorul de gaz MQ-6
Acest modul de detecție gaz funcționează la o tensiune de
5V și se folosește pentru detectarea emisiilor de gaz
butan, iso-butan și propan lichefiat.
În momentul în care senzorul detectează o anumită
concentrație de gaz în aer, trimite un semnal digital
(valoarea 0 – dacă trece de limita setată, valoarea 1- în caz
contrar) către placa de dezvoltare, mai apoi mesajul fiind
transmis pe WhatsApp și afișat în interfața grafică. - Senzorul de temperatură și umiditate DHT11
DHT11 este un senzor de umiditate și temperatură
de înaltă performanță. Senzorul asigură o bună fiabilitate
și stabilitate. Ieșirea este oferită ca semnal digital. - Senzorul ultrasonic HC-SR04
Senzorul emite ultrasunete la o frecvență de 40000Hz
care circulă prin aer, iar dacă întâlnește un obstacol,
acesta se va întoarce înapoi spre modul, astfel, luând în
considerare viteza sunetului se poate calcula distanța
până la obiect. - Senzor detecție monoxid de carbon MQ-7
Acesta este un senzor de monoxid de carbon simplu (CO),
potrivit pentru detectarea concentrațiilor de CO în aer.
Senzorul MQ-7 poate detecta concentrațiile de CO-gaze
de la 20 la 2000 ppm.Valorile analogice primite de la acest
senzor merg de la 0 la 4095 ele fiind afișate în interfața
grafică transformate în concentrația aproximativă de gaz
(de la 20 la 2000 ppm). - Senzor detecție flacără infraroșu
Acest senzor este util pentru a detecta flacăra sau alte
surse de radiație cu lungimea de unde cuprinsă în
intervalul menționat.
III. MODULELE - Modulul L298N cu punte h dublă
Acest modul este utilizat pentru controlul motoarelor DC
cu reductor, el fiind conectat la placa de dezvoltare ESP
32 WROOM.
Acest modul permite controlul vitezei și direcția
motoarelor. - Modulul accelerometru și giroscop MPU6050
Acest modul conține atât giroscop cât și accelerometru cu
trei axe. Este foarte precis întrucât conține convertitor 16
biți analog către digital pentru fiecare canal, astfel
capturează pe toate cele trei axe simultan.
Senzorul trimite informații prin protocolul I2C către placa
de dezvoltare, acestea fiind reprezentate printr-o animație
3D în interfața grafică. În plus, are și propriul senzor de
temperatură.
IV. CAMERA VIDEO
Pentru camera video am utilizat o placă de dezvoltare
(ESP32-CAM) separată, strict pentru transmiterea video.
Placa de dezvoltare utilizată are în componența sa și
camera video. Imaginea transmisă poate fi configurată, din
interfața grafică.
V. ALIMENTAREA
Pentru alimentarea tuturor electronicelor am folosit 4
acumulatori LI-ION Well 18650, 3.7V, 2200 mAh
conectați în serie. Controller-ul de motoare este alimentat
direct la bornele acumulatorilor, în timp ce celelalte
electronice sunt alimentate de un MODUL COBORÂRE
TENSIUNE LM2596 care este reglat la ieșire la valoarea
de 5 V.
• SOFTWARE
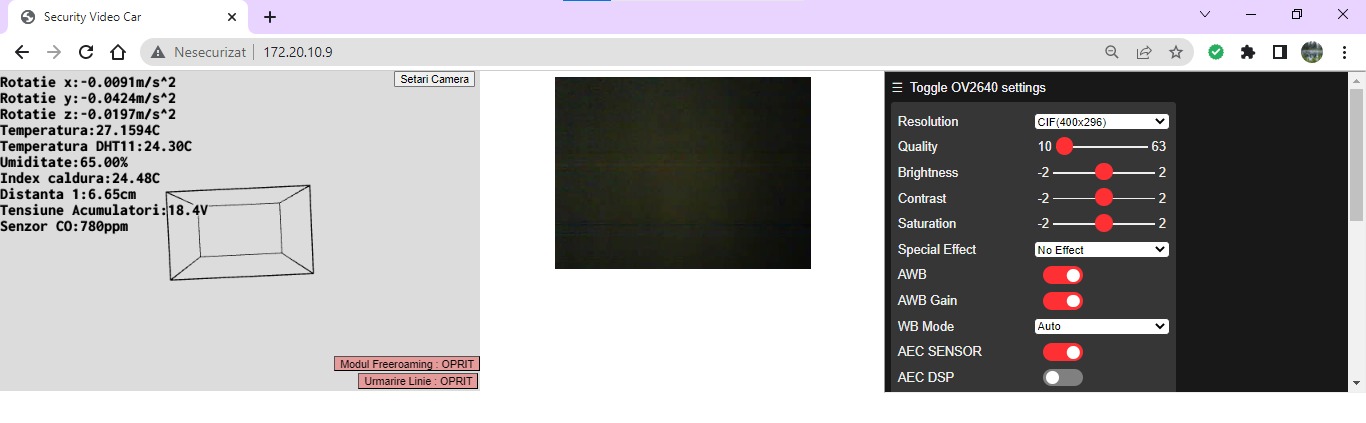
I. INTERFAȚA GRAFICĂ
Interfața grafică constă în controlul motoarelor, reprezentănd informațiile primite atăt de la senzori, căt și de la camera video. Interfața grafică este alcătuită din 3 zone:
- Informațiile primite de la următorii senzori: senzorul de accelerație pe axa X, senzorul de accelerație pe axa Y, senzorul de accelerație pe axa Z, senzorul de temperatură a boardului, senzorul de temperatură a aerului, senzorul de umiditate a aerului, senzorul de flacără, senzorul ultrasonic, senzorii de gaze, senzorul de prezență, senzorul de tensiune a acumulatorilor și reprezentarea grafică a informațiilor primite de la giroscop.
- Informațiile video, în timp real, primite de la camera video.
- Setările camerei.
- Butonul on/off a funcției freeroaming.
Interfața grafică a fost scrisă pe placa de dezvoltare, utilizănd următoarele limbaje de programare: Arduino și Javascript. De asemenea, am utilizat și HTML și CSS.
Cerinte sistem
Un calculator cu conexiune la internet
Realizatori
Lucas Tomescu
- Scoala: Liceul Teoretic “Traian Lalescu”
- Clasa: 11
- Judet: Hunedoara
- Oras: Hunedoara
Irina Raduly
- Scoala: Liceul Teoretic “Traian Lalescu”
- Clasa: 11
- Judet: Hunedoara
- Oras: Hunedoara
Screenshots