Informatii generale
- Categorie: Roboti
- Judetul: Argeș
- Surse: GitHub - Vladandrei23/STR: Smart Transport Robot
Descriere
STR (Smart Transportation Robot) este un robot al cărui concept are în prezent două scopuri principale: utilitar și competitiv, care, la rândul lor, reprezintă două ramuri cu diverse obiective.
-
Din punct de vedere utilitar, robotul a suferit schimbări software. Utilizăm capacitatea de parcurgere a unor trasee generate dinamic, localizarea fiind realizată prin intermediul unei librării ce procesează datele furnizate de encoderele încorporate în motoare, realizând o sortare și livrare a cuburilor de culori diferite, în funcție de nivelul și poziția indicatorilor de culori principale din spectrul RGB.
(Această schimbare a fost concepută cu scopul sortării anumitor deșeuri de formă cubică, astfel implementând o metodă de reciclare a obiectelor în funcție de culoarea acestora.) -
Din punct de vedere competitiv, robotul a concurat în cadrul concursului FTC, având mai multe sarcini de îndeplinit. Acesta funcționează atât autonom, cât și teleghidat. În cele două perioade robotul este capabil de completarea următoarelor misiuni:
• colectarea, transportarea și plasarea unor elemente de joc (cuburi, sfere) de diferite greutăți, pe anumite niveluri ale unui “turn”;
• generarea și urmarea unor trasee în perioada de autonom și plasarea elementelor pe nivelul indicat de către detecție;
• rotirea unui disc pe care sunt plasate alt tip de elemente de joc (rațe de cauciuc) cu scopul aducerii acestora în perimetrul terenului;
• plasarea elementului utilizat pentru detecție în vârful “turnului”.
Tehnologii
Pentru programarea robotului am utilizat: Android Studio (limbajul Java)
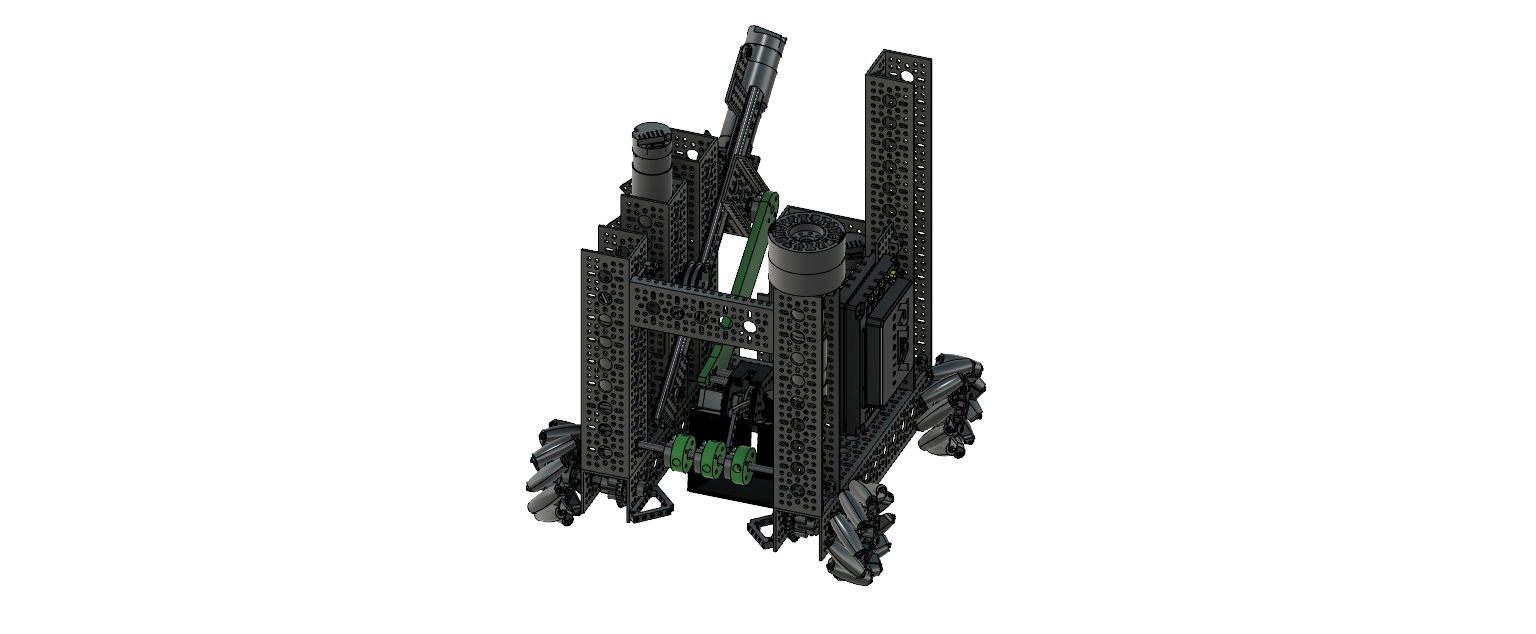
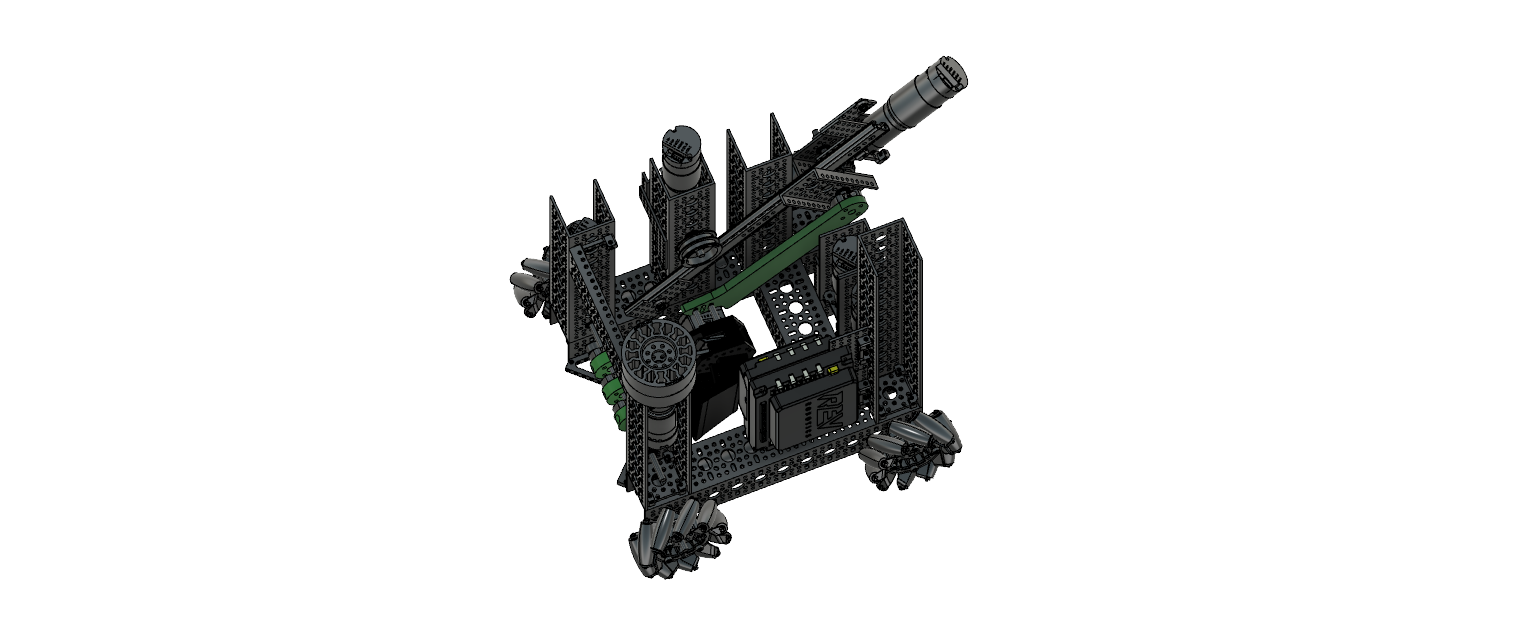
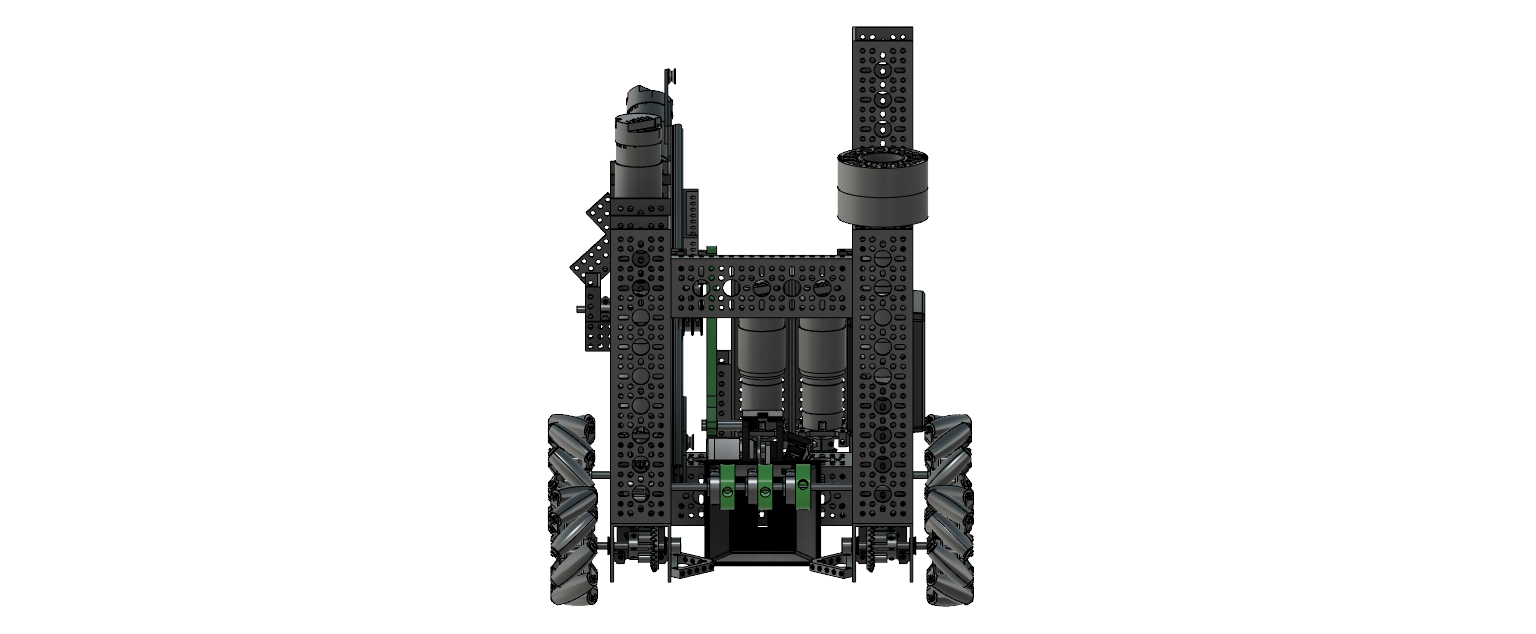
Pentru proiectarea 3D a robotului am utilizat: Autodesk Fusion 360
Pentru construcția robotului am utilizat:
• 1 REV Control Hub
• 1 REV Expansion Hub
• 5 Motoare goBILDA 5202 Series Yellow Jacket Planetary Gear Motor (13.7:1 Ratio, 435 RPM, 3.3 - 5V Encoder)
• 2 Motoare goBILDA 5202 Series Yellow Jacket Planetary Gear Motor (50.9:1 Ratio, 117 RPM, 3.3 - 5V Encoder)
• 1 Motor goBILDA 5202 Series Yellow Jacket Planetary Gear Motor (5.2:1 Ratio, 1150 RPM, 3.3 - 5V Encoder)
• 1 Servomotor Smart Robot Servo
• 1 Senzor culoare & proximitate REV Color Sensor V3
• 1 Cameră web Trust Tyro
• 1 Baterie Matrix 12V 3000mAh NiMH
• Cabluri de conexiune și adaptoare
—------------
• 4 Roți Mecanum 96 mm
• 2 Roți Gecko 72 mm
• 4 Roți fixe 45 mm
• Piese printate 3D
• Grinzi de tip “U” și “Low-Side U”
• Plăci grilă
• Glisieră triplă
• Axuri cu o suprafață plată
• Sonic Hubs
• Roți Conice
• Rulmenți
• Fixatoare de ax
• Scripete și sfoară
• Furtun alimentar 5 x 8 mm
• Șuruburi, piulițe, distanțiere, șaibe
Cerinte sistem
Orice dispozitiv cu browser și conexiune WI-FI Direct (Web app) / Telefon compatibil cu aplicația FTC Driver Station (Android app)
2 Controlere Wired (PS4 / Xbox 360 / Logitech F310) *
-
- Doar pentru perioada teleghidată
Realizatori
Vlad Cruceru
- Scoala: Colegiul Național “Zinca Golescu”
- Clasa: 10
- Judet: Argeș
- Oras: Pitești
Bianca Olaru
- Scoala: Colegiul Național „Zinca Golescu”
- Clasa: 10
- Judet: Argeș
- Oras: Pitești
Screenshots