Informatii generale
- Categorie: Roboti
- Judetul: București
- Surse: GitHub - atrex-robot/atrex: Documentation, Code, CAD files, all required to build the atrex robot
Descriere
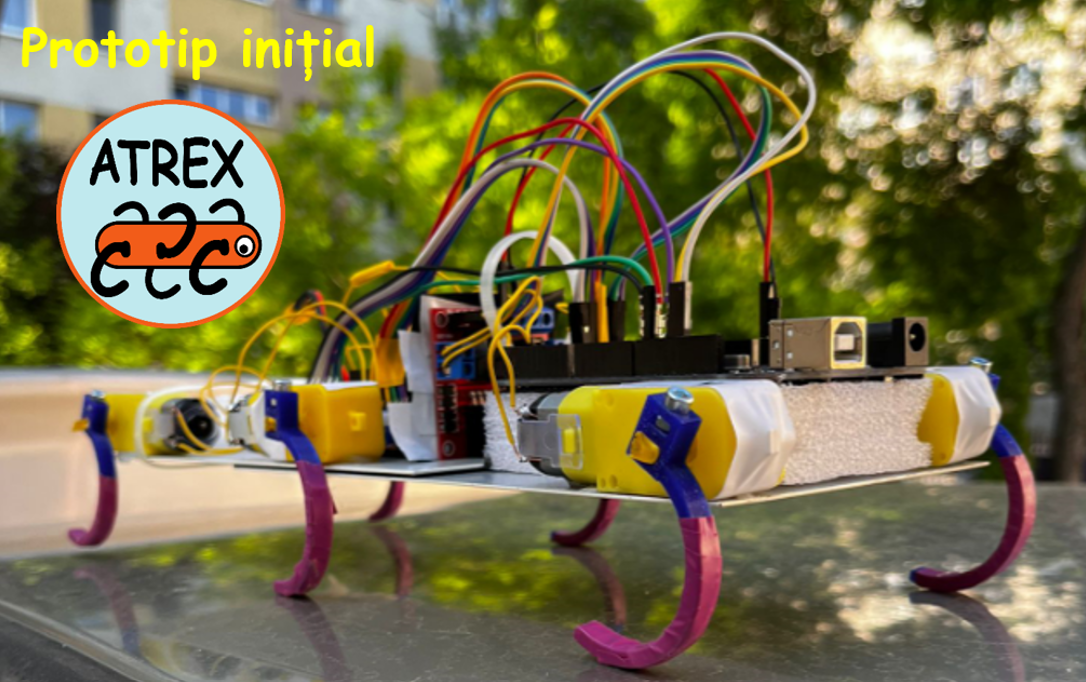
ATREX este un robot mobil hexapod care poate funcționa atât în mod telecomandat, cât și în mod autonom.
Vizând o gamă largă de aplicații, de la cercetare, la recunoaștere într-un mediu necunoscut, sau chiar la misiuni de salvare, Atrex are un grad ridicat de modularitate.
Atașarea diverselor instrumente, atât de cercetare, cât și de recunoaștere este facilă, datorită construcției acestuia.
Sistemul de locomoție inedit îi oferă o stabilitate intrinsecă, datorată celor 6 picioare compliante, care pot fi extrem de ușor înlocuite de roți.
Tehnologii
Pentru a eficientiza procesul de prototipare / proiectare, am utilizat Autodesk Inventor.
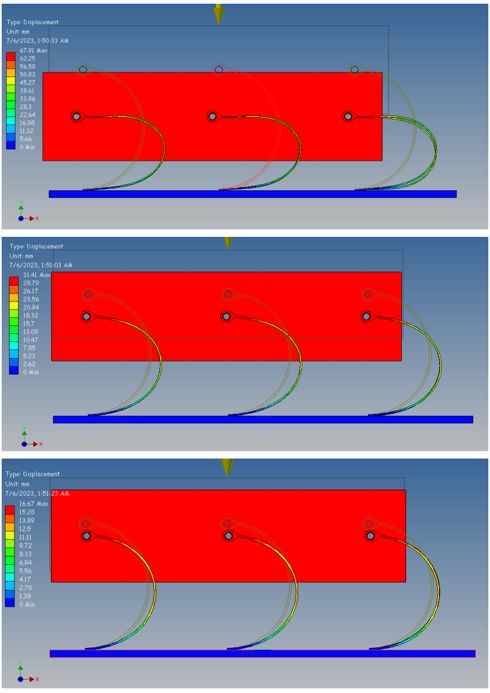
Structura de rezistență a robotului este realizată din aluminiu, dar și din piese printate 3D. Acestea permit deplasarea pe teren accidentat și transportul de încărcături mari, în raport cu masa robotului. Materialele utilizate sunt PLA / PETG / PA, iar timpul total de printare este de cca 30 de ore.
Utilizăm 6 motoare DC 12V 37D, cu reductor. Acestea angrenează, la fiecare picior, câte o transmisie prin curea sincronă, care a permis identificarea unui raport de drive optim, în același timp eliminând riscul distrugerii motoarelor și cuplând piciorul la motor fără backlash.
Tot pentru a proteja motorul și a face operarea robotului mai eficientă, axurile picioarelor sunt susținute de rulmenți.
Împreună, transmisia pe curele și rulmenții permit mișcarea cu consum minim de energie.
Pentru a alimenta robotul am ales o sursă de energie destinată automodelelor RC. Folosim o baterie LiPo 4S (14.8V), de 6200 mAh 60C.
Pentru a alimenta electronica digitală folosim coborâtoare de tensiune.
Pentru a controla motoarele, folosim 3 drivere duble. Folosim drivere care dispun de UVLO (Under Voltage Lock Out), protecție ESD. Pe lângă acestea, am adăugat siguranțe fuzibile.
Pentru a monitoriza condițiile din robot și pentru a controla sistemul activ de răcire, folosim senzor de temperatură în interiorul robotului.
Pentru a urmări permanent și exact poziția picioarelor, folosim encodere absolute de tip hall AS5600, ce oferă precizie de 12 biți. Aceste encodere permit dezvoltarea unor metode de locomoție (gait-uri) eficiente, rapide și stabile, folosind bucle închise de control (PID).
Tot pentru îmbunătățirea locomoției, folosim și un accelerometru.
Driverele și encoderele sunt conectate la o placa Arduino Mega, responsabilă pentru controlul motoarelor (implicit sincronizarea și alternarea pașilor picioarelor pentru un mers cât mai lin).
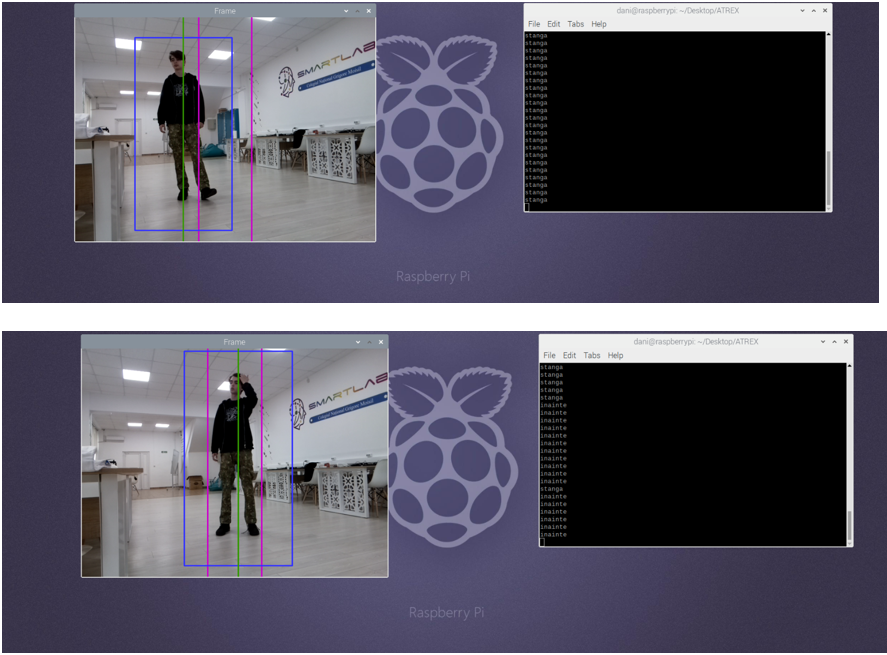
Pentru controlul efectiv al robotului, am optat pentru un Raspberry Pi Model 3 B, echipat cu o cameră. Acesta acționează ca un sistem de control central, permițând interacțiunea cu utilizatorul și oferind posibilitatea de autonomie.
Sistemul este programat în Python, iar în modul autonom, robotul poate urmări oameni. Pentru aceasta, se folosește cv2 împreună cu descriptorul HOG (Histogram of Oriented Gradients), iar câteva marcaje vizuale sunt aplicate pe cadru pentru a facilita identificarea și orientarea.
Pe viitor, ne propunem adăugarea mai multor gait-uri, dar și a unor metode noi de deplasare (săritură). Pentru a exploata la maxim platforma, vom adăuga unelte pentru misiuni de recuperare.
Cerinte sistem
Laptop / PC, capabil de conexiune ethernet/wifi, cu aplicațiile aferente remote desktop / SSH
Realizatori
Alexandru Danilov
- Scoala: Colegiul Național „Grigore Moisil”
- Clasa: 11
- Judet: București
- Oras: București
Andrei Iatagan
- Scoala: Colegiul National “Grigore Moisil”
- Clasa: 12
- Judet: București
- Oras: București
Screenshots