Informatii generale
- Categorie: Roboti
- Judetul: Prahova
- Surse: GitHub - D0ana/InfoEducatie_Barcainatorul: Barcainatorul este un proiect realizat pentru Olimpiada de Inovare și Creație digitală - INFOEDUCAȚIE 2021, categoria Roboti. Acest proiect are ca scop principal garantarea pescuirii eficiente, reducerea cantitatii de energie și de efort și a impactului asupra apei in contrast cu echipamentele tradiționale de momit.
Descriere
Intrebarea secolului, ce face un pescar pe o balta? Raspunsul pare unul evident in prima instanta, pescuieste, dar este mult mai mult de atat, putem spune ca este si o arta si un sport simultan. Speranta, pierdedre, frustrare si vointa sunt cuvintele care descriu cel mai bine pescarul.
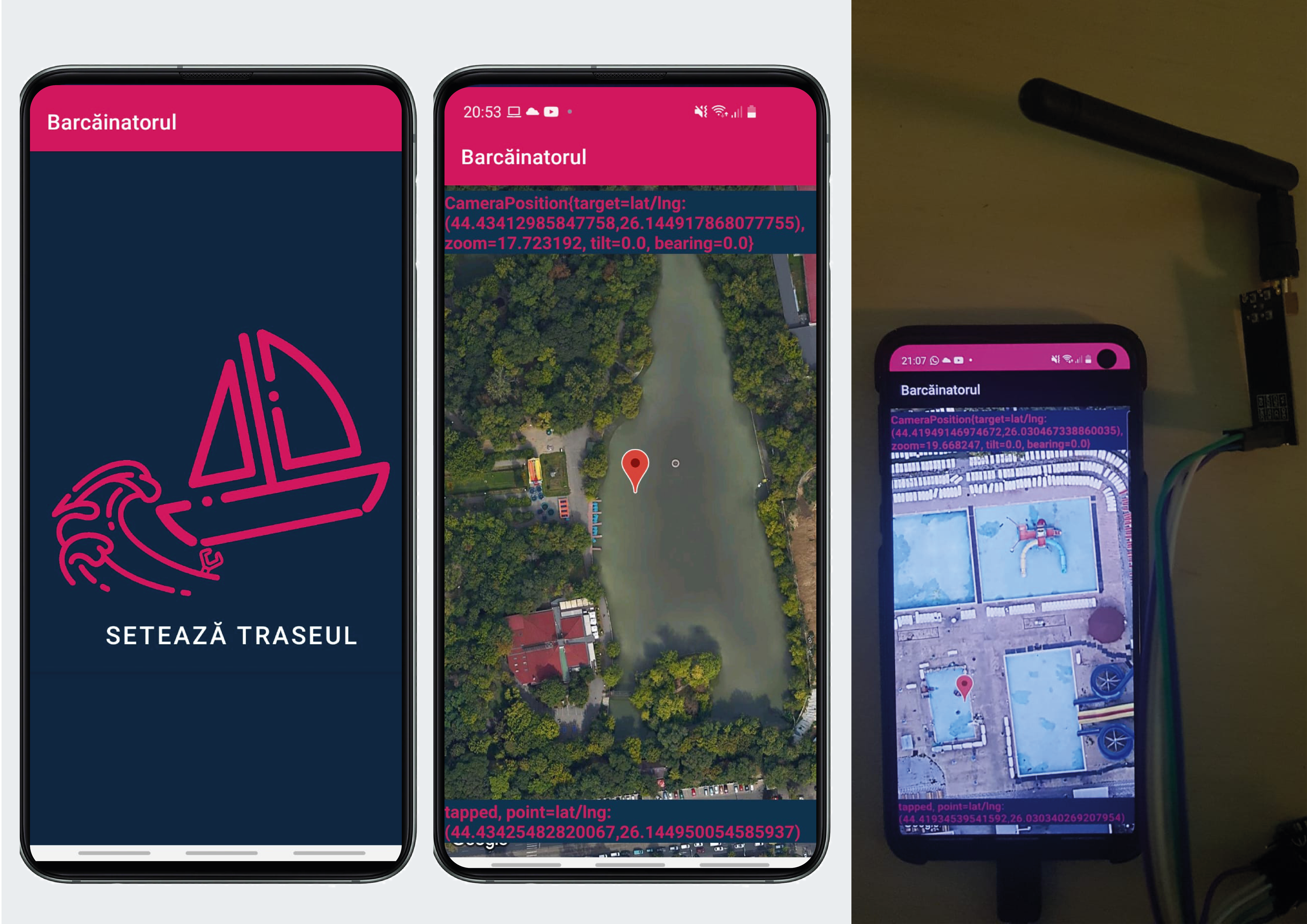
Barcainatorul este eroul povestii. Vine de nicaieri (doar selectezi traseul din aplicatie), se va deplasa rapid la punctul final si va arunca momeala din cuva pozitionata strategic, ademenind pana si cel mai feroce peste, usurand treaba pescarilor.
Nu v-am convins inca? Cititi mai departe pentru a afla de ce acest erou este protagonistul tuturor povestilor pescaresti.
Tehnologii
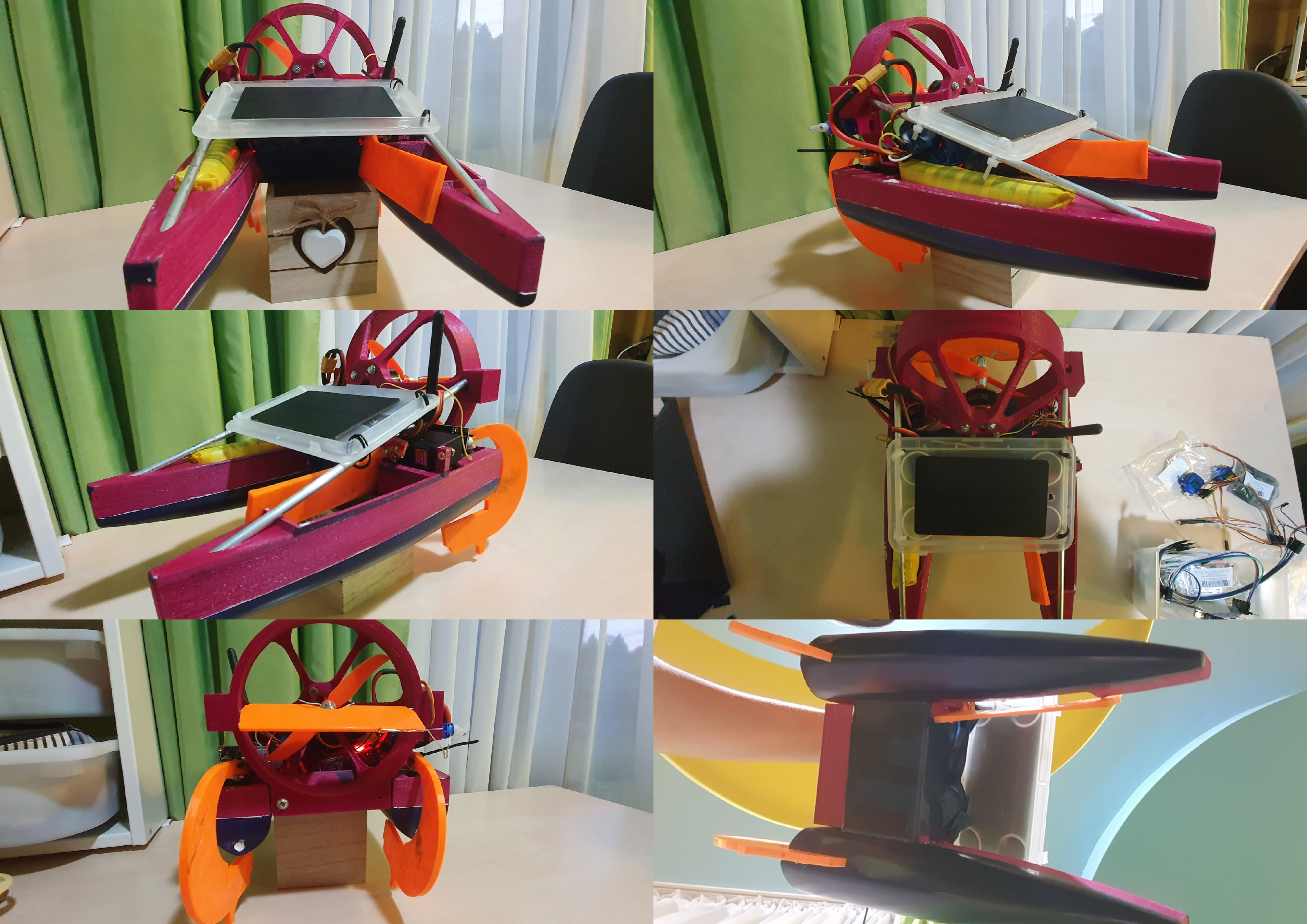
Barcainatorul este un robot plutitor, de tip barca Catamaran. Modul principal de translatie este asigurat de un motor fara perii, pozitionat in spatele barcii folosind propulsia aerului cu ajutoul unei eleci de 20 cm. Carmele barcii sunt pozitionate coplanar cu planul elicii, aceste find actionate cu ajutorul a 2 servomotare. Unghiul de atac al barcii este controlat cu ajutorul unui alt servomotor modificand astfel directia fluxului de aer. Un al patrulea servomotor se ocupa cu deschiderea si inchiderea cuvei de mancare desfacand trapa. Toate acestea fiind alimntate cu ajutorul a doua surse, cea principala, un acumulator LiPo cu 3 celule de 3 000 mAh si un panou solar pentru regimul de urgenta.
Creierul barcii este reprezentat de un mini computer Raspberry Pi 3B+, care proceseaza datele colectate de senzori si informatiile primite de la statia de comanda. Principalul indice furnizat de senzori este pozitia curenta a robotului folosind un senzor gps, acesta servind la stabilirea traseului barcii. Pentru a asigura stabilitate in timpul deplasarii, orientarea barcii este corectata cu ajutorul unui senzor de tip giroscopic. In final traseul este transmis Barcainatorului prin modulul wireless NRF24L01+.
Baza de control este compusa dintr-un microcontroler Seeeduino Xiao si un transmitaor NRF24L01+. Aceasta comunica cu aplicatia de pe telefon prin serial actionand ca o punte intre barca si telefon.
In ceea ce priveste alimentarea robotului tensiunea de 11,1 V a acumulatorului a fost transformata in 5 V folosind un modul step-down, iar cea a panoului solar, fiind variabila a fost mentinuta tot la 5 V de catre un modul step-up.
Pentru a dezvolta codul am folosit 3 limbaje: java, c++ si python. Codul a fost impartit in doua sectiuni: aplicatia de telefon prin care utilizatorul poate comunica cu barca si codul propiu-zis care transforma robotul dintr-un obiect static intr-o barca complet functionala si autonoma.
Cerinte sistem
- telefon cu sitemul de operare Android
- lac, pesti si momeala
Realizatori
Oana Datcu
- Scoala: C.N. “Mihai Viteazul”
- Clasa: 10
- Judet: Prahova
- Oras: Ploiesti
Alexandru Oprea
- Scoala: C.N. “Mihai Viteazul”
- Clasa: 11
- Judet: Prahova
- Oras: Ploiesti
Screenshots