Informatii generale
- Categorie: Roboti
- Judetul: Vâlcea
- Surse: GitHub - angelinapanescu/Hospibot
Descriere
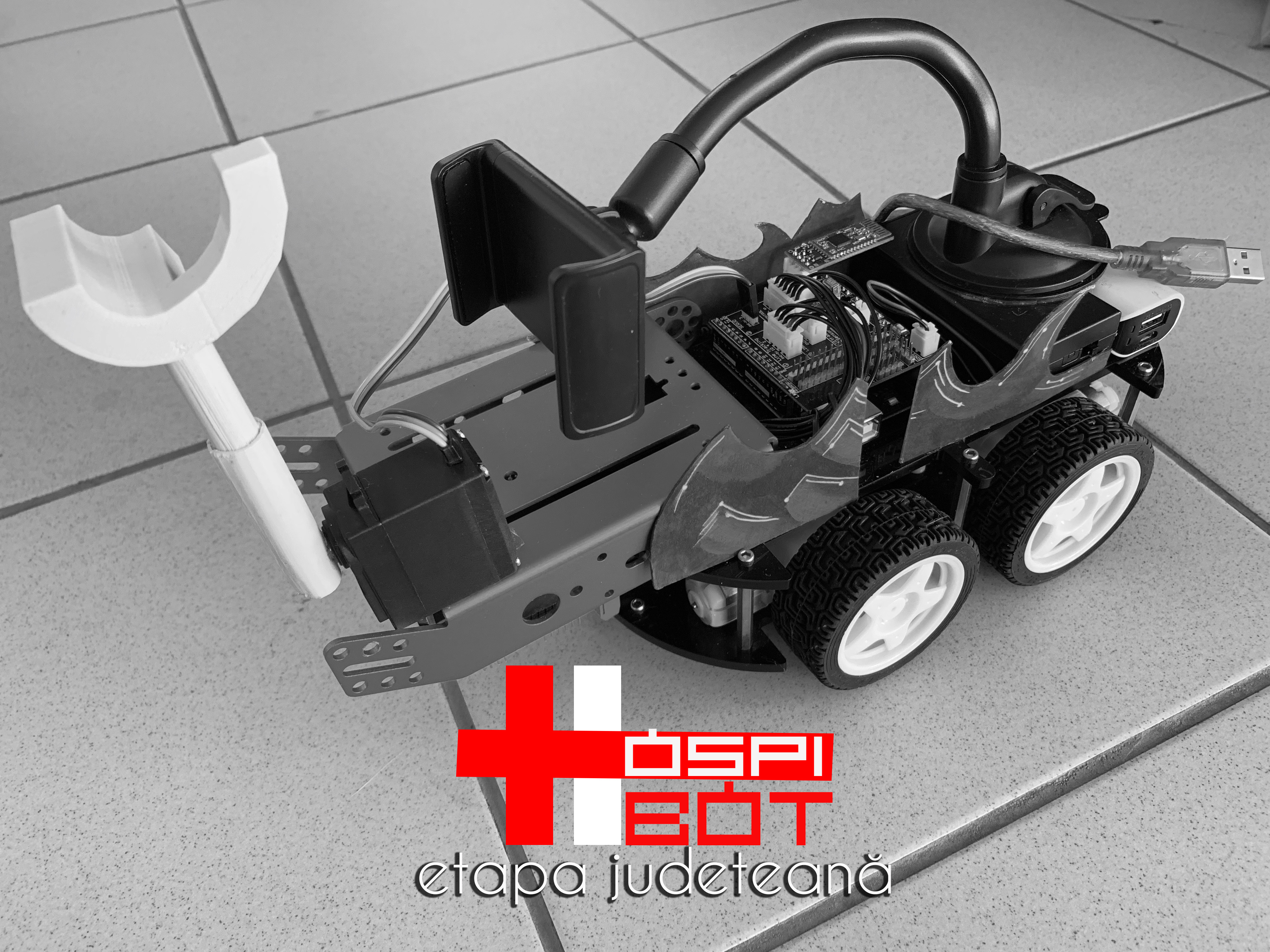
Hospibot este un robot care îmbogățește principiul line tracking cu o conexiune stabilită între 2 module nRF24L01 și cu un sistem alcătuit dintr-o placă Raspberry Pi 0 W, conectată la camera Raspberry Pi v.2, care face posibilă transmiterea de imagini live. Proiectul se definește pe 2 planuri între care se realizează transfer de date: robotul propriu-zis și mânușa interactivă, care asigură controlul robotului prin mișcarea mâinii. Astfel, este permisă comunicarea între un pacient al secției de pediatrie a unui spital și robotul, care are funcția de a redefini posibilul și realitatea. În timpul refacerii în urma unei intervenții, copiii sunt adesea nevoiți să nu părăsească patul, în ciuda dorinței de explorare, iar, în acest caz, Hospibot proiectează și aduce mai aproape realitatea spitalului.
Hospibot face parte dintr-o rețea conceptuală de roboți identici, fiecare atribuit unui pacient, care se deplasează pe o rețea de bandă electrică dezvoltată pe marginile holurilor din spital. Astfel, nu numai că robotul se poate deplasa, urmărind linia, către încăperi prestabilite, dar poate fi controlat și de către copii, prin mișcările cu efecte prestabilite ale mâinii lor. Transmiterea imaginilor live face posibilă ocolirea eventualelor obstacole, la nivelul robotului, și explorarea secției, din punctul de vedere al copiilor.
În altă ordine de idei, Hospibot are și rol educațional. În partea anterioară, robotul prezintă 2 mânuțe susținute de 2 servomotoare, conectate, însă, la 2 plăci distincte. Mâna stângă poate saluta, la deplasarea în față a robotului, pe când mâna dreaptă poate fi pre-programată de către copii. În acest sens, pacienții au șansa să învețe bazele programării în Arduino, dezvoltând un program simplu, care le permite să personalizeze mișcările mâinii drepte.
Tehnologii
Partea mecanică a robotului este alcătuită din:
• 1 șasiu realizat din filament la imprimanta 3D;
• 2 mânuțe realizate din filament la imprimanta 3D;
• 4 roți.
Partea electronică a robotului este alcătuită din:
• 2 plăci de dezvoltare NANO V3 ATMEGA328p compatibile Arduino;
• 1 placă de dezvoltare UNO R3 compatibilă Arduino;
• 1 placă Raspberry Pi 0 W;
• 1 cameră Raspberry Pi v.2;
• 1 modul Accelerometru și Giroscop cu 3 axe MPU6050ș
• 1 modul L298N, la care sunt conectate 4 motoare DC;
• 2 module Nrf24L01 și 2 plăci adaptoare, care vizează comunicarea permanentă dintre copil și robot;
• 1 modul de urmărire a liniei, care permite deplasarea pe marginile holurilor din spital. Alcătuit din 3 senzori, el află poziția robotului pe banda electrică și virează dreapta, daca senzorul drept sesizează banda, stânga daca senzorul stâng o sesizează și înaintează, dacă modulul este centrat;
• 2 servomotoare;
• 1 set de senzori ultrasonici;
• 3 seturi de acumulatori.
Cerinte sistem
Arduino Software IDE+Drivers
Realizatori
Angelina Panescu
- Scoala: Colegiul Național “Mircea cel Bătrân”
- Clasa: 10
- Judet: Vâlcea
- Oras: Râmnicu Vâlcea
Eduard Alexandru-Gruia
- Scoala: Colegiul Național “Mircea cel Bătrân”
- Clasa: 10
- Judet: Vâlcea
- Oras: Râmnicu Vâlcea
Screenshots