Informatii generale
- Categorie: Roboti
- Judetul: Maramureș
- Surse: GitHub - szaboilinca/infoeducatie: Robot industrial tip Delta pentru industria farmaceutică.
Descriere
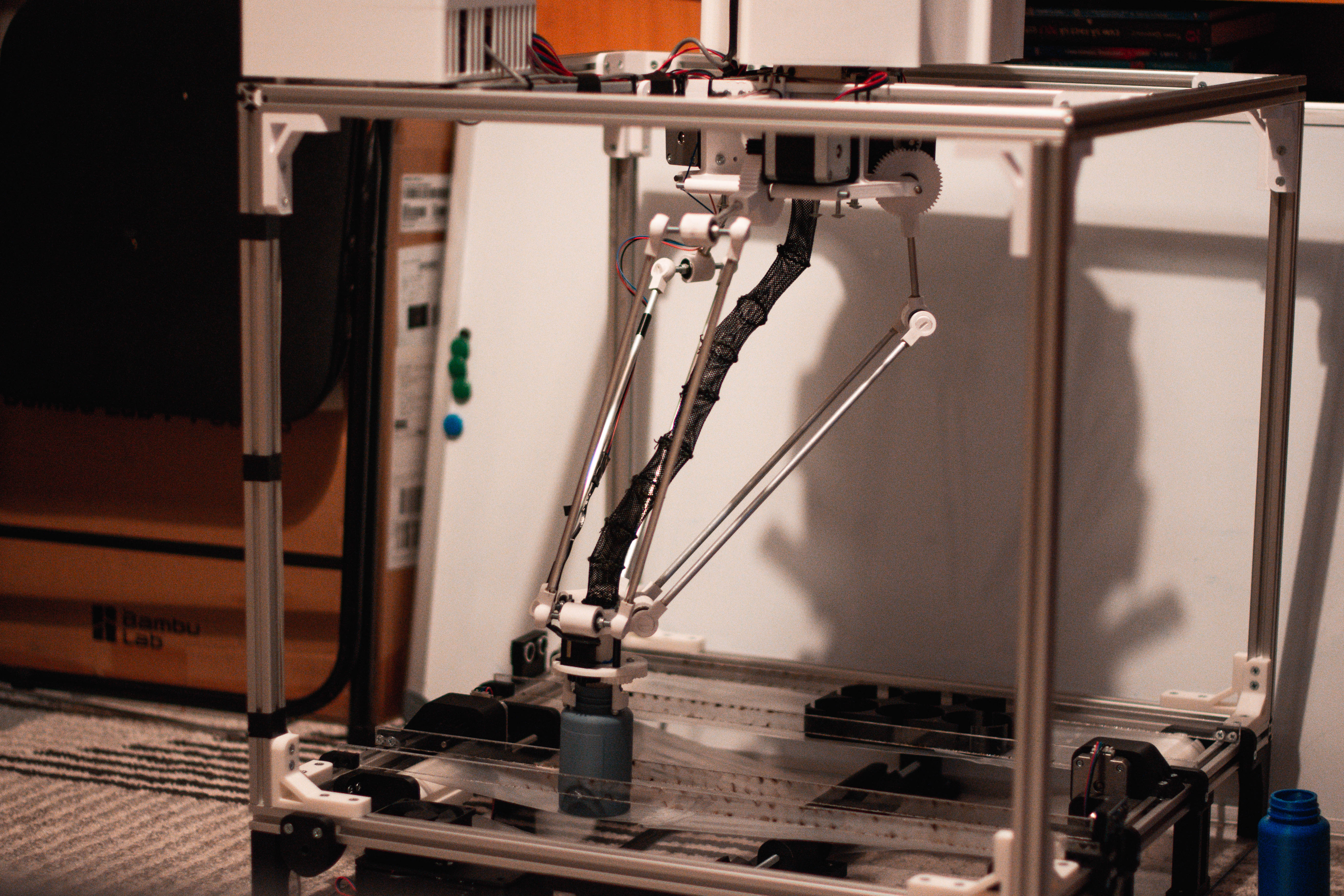
Proiectul propune un robot paralel de tip Delta destinat industriei farmaceutice, cu rolul de a automatiza manipularea și umplerea recipientelor cu medicamente solide, cum ar fi capsule sau comprimate. Acesta integrează într-o singură unitate funcțională operații care, în mod tradițional, sunt realizate de mai multe echipamente, reducând astfel complexitatea, spațiul ocupat și nevoia de intervenție umană. Robotul este conceput pentru funcționare 24/7, cu capabilități extinse de viteză, precizie și flexibilitate, putând fi adaptat pentru linii de producție diverse, inclusiv în domeniile cosmetic sau micro-electronic.
Tehnologii
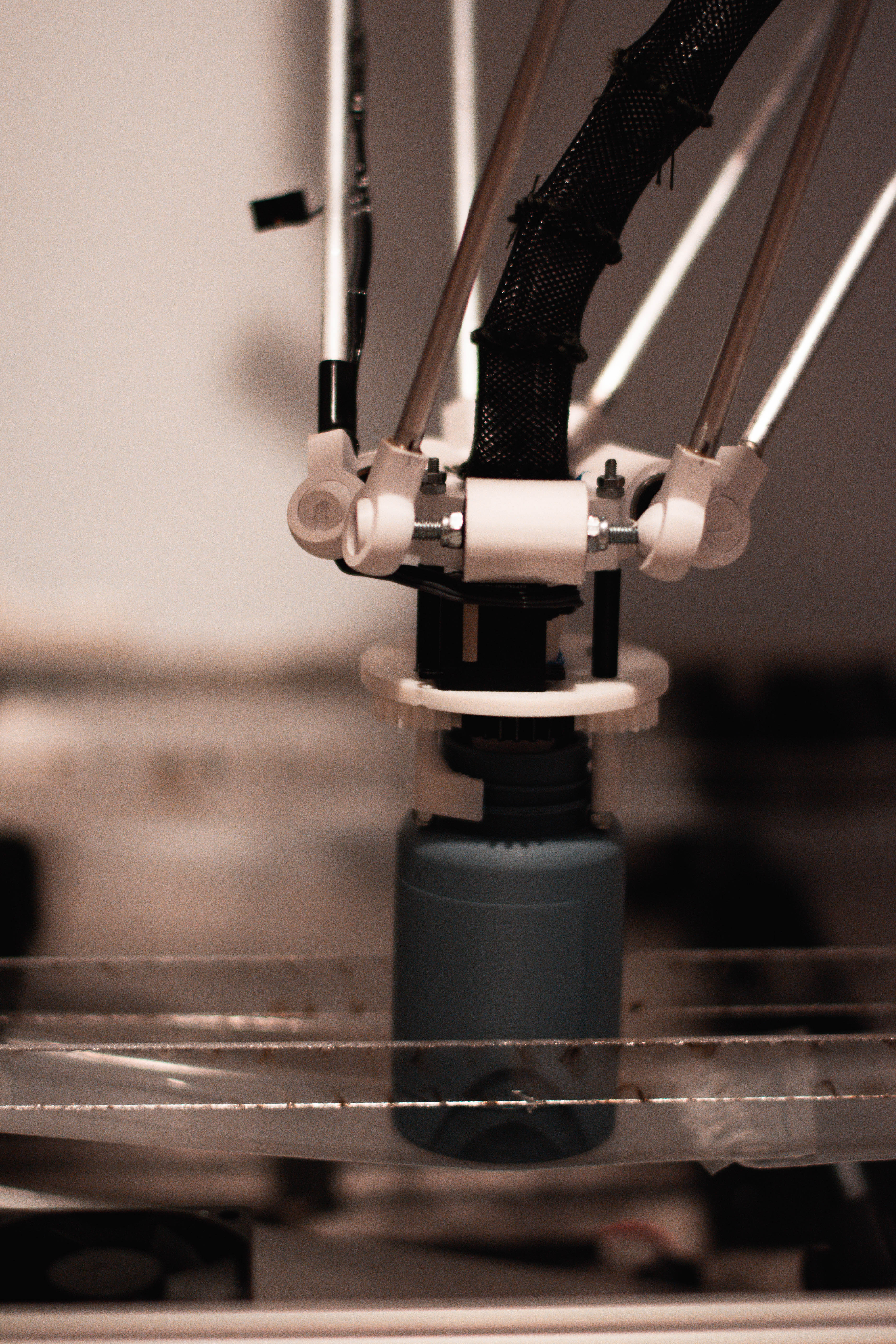
Structura robotului este bazată pe o arhitectură Delta, cu trei brațe articulate ce controlează o platformă mobilă prin translații precise în spațiul tridimensional. Acționarea este realizată de trei motoare pas cu pas Nema 17 și un servo-motor pentru sistemul de prindere, toate controlate două plăci Arduino UNO cu shield-uri CNC V3 și drivere DRV8825 și A4988. Sistemul include un mecanism modular de prindere cu pinioane pentru adaptarea la diferite recipiente, un dozator cu discuri rotative pentru distribuirea capsulelor și senzori pentru calibrare și numărare. Mișcarea este guvernată prin calcule de cinematică inversă, implementate în Arduino IDE, iar poziționarea brațelor este corectată automat cu ajutorul senzorilor de limită.
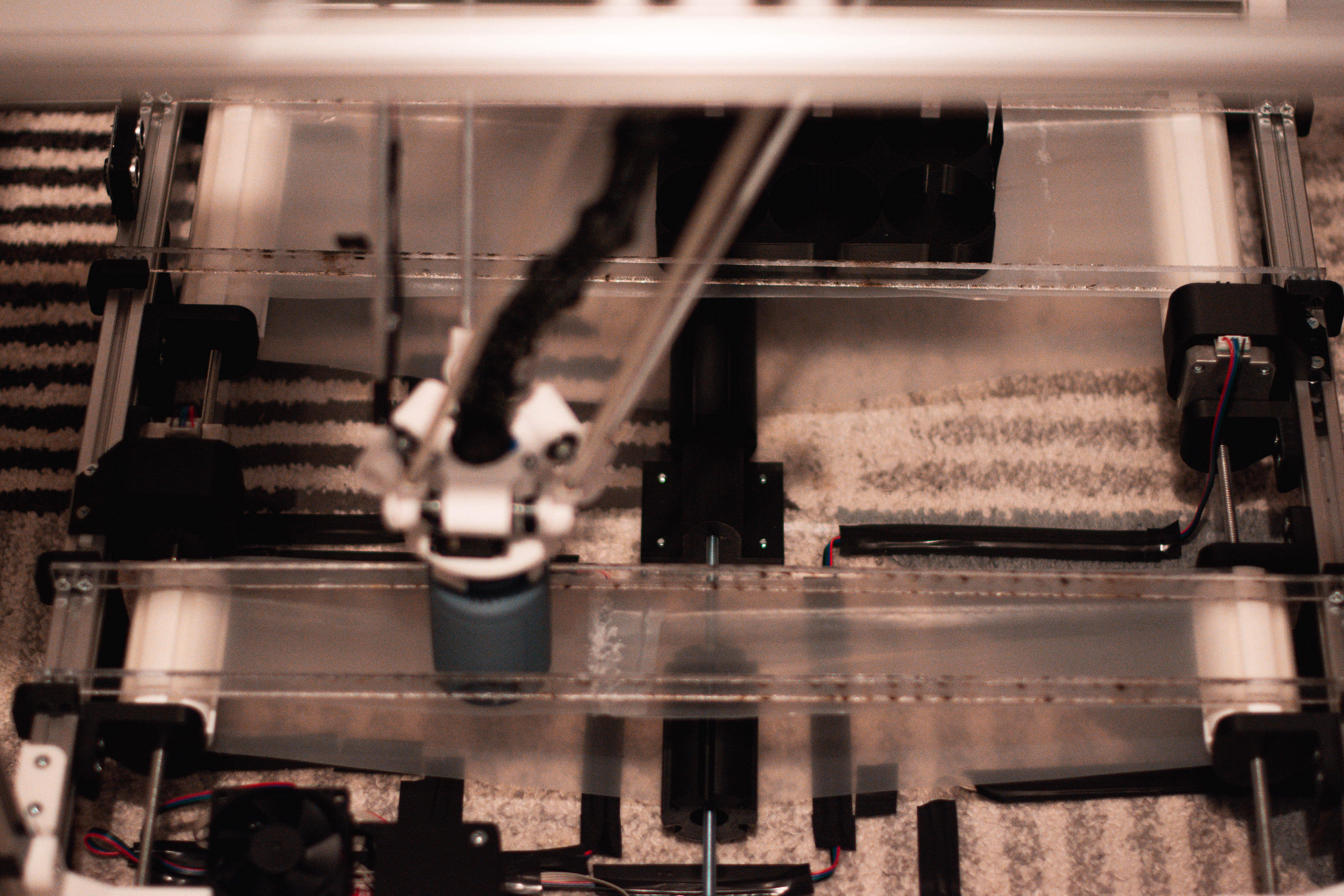
În plus, robotul este echipat cu două benzi rulante independente, fiecare acționată de câte un motor pas cu pas suplimentar. Aceste benzi sunt utilizate pentru transportul recipientelor farmaceutice spre și din zona activă a robotului. Fiecare bandă este monitorizată de un senzor ultrasonic de distanță, care detectează prezența recipientelor și activează motorul corespunzător pentru a asigura o alimentare continuă și sincronizată a sistemului. Această extensie crește nivelul de autonomie al robotului și eficiența fluxului operațional, permițând integrarea ușoară în linii de producție complet automatizate.
Cerinte sistem
Alimentare electrică:
-sursă de 12V / 7A pentru motoare și senzori, conexiune USB pentru alimentarea microcontrolerului (braț și dozator)
-sursă de 12V / 6A pentru motoare și senzori, conexiune USB pentru alimentarea microcontrolerului (benzi rulante).
-platformă de control: Arduino UNO R3 cu shield CNC V3 și drivere DRV8825/A4988.
-software necesar: Arduino IDE (pentru codul de control),
-sistem de operare compatibil: Windows/Linux/MacOS
Componente necesare: 6 motoare Nema 17, 1 servo-motor micro, senzori tip microswitch și senzor de proximitate LJ12A3-4-Z/BX, ventilatoare 12V, piese imprimate 3D, profile V-Slot din aluminiu, senzori ultrasonici de proximitate.
Realizatori
Ilinca Szabo
- Scoala: Colegiul Național ,Vasile Lucaciu"
- Clasa: 11
- Judet: Maramureș
- Oras: Baia Mare
Screenshots